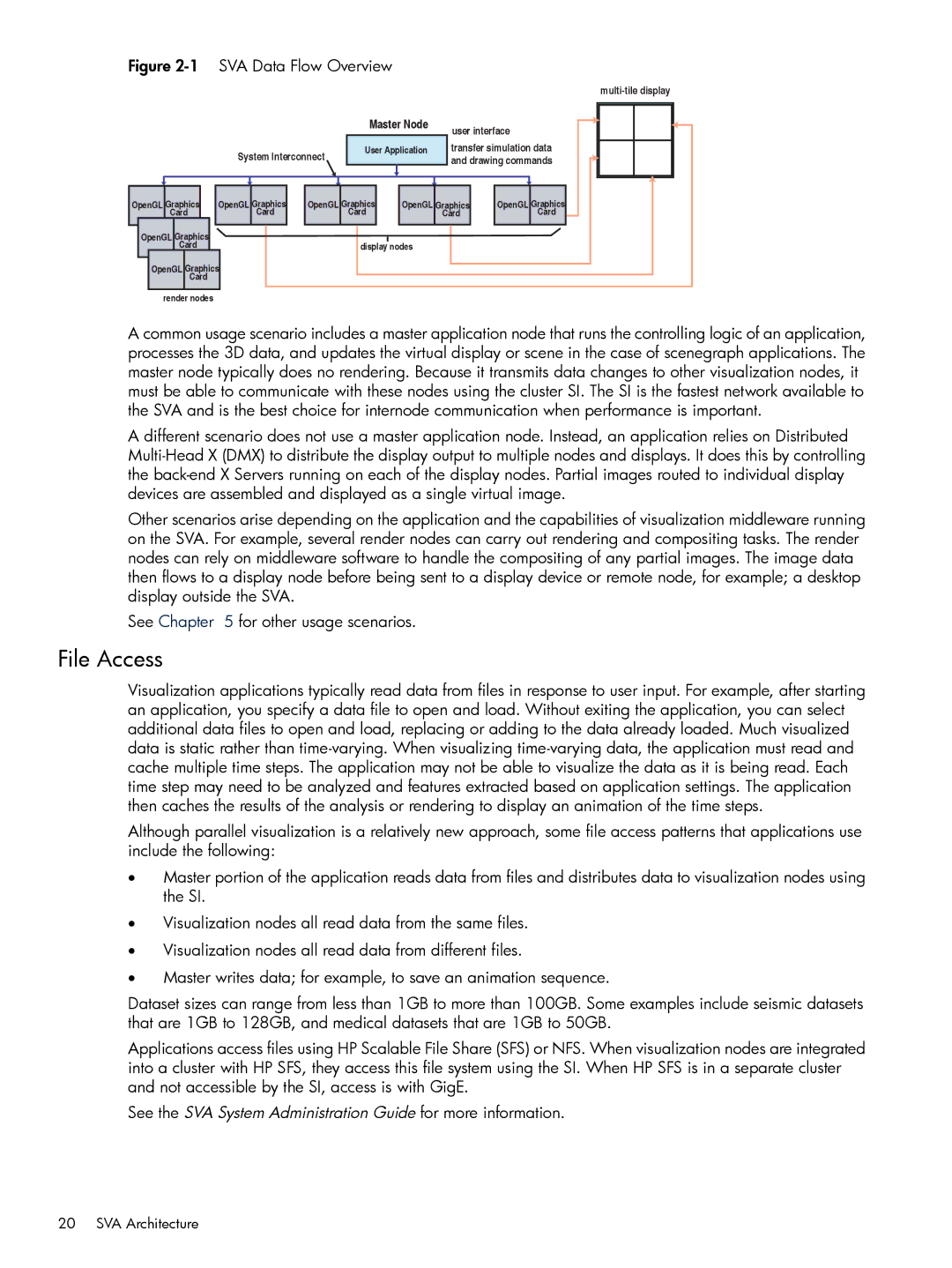
Figure | SVA Data Flow Overview |
|
|
| ||
|
|
|
|
|
| |
|
|
| Master Node | user interface | ||
|
|
|
|
| ||
| System Interconnect | User Application | transfer simulation data | |||
|
|
| and drawing commands | |||
|
|
|
|
| ||
OpenGL Graphics | OpenGL Graphics | OpenGL Graphics | OpenGL Graphics | OpenGL Graphics | ||
Card | Card |
| Card |
| Card | Card |
OpenGL Graphics |
|
|
|
|
|
|
Card |
|
| display nodes |
|
| |
OpenGL Graphics |
|
|
|
|
| |
Card |
|
|
|
|
|
|
render nodes |
|
|
|
|
|
|
A common usage scenario includes a master application node that runs the controlling logic of an application, processes the 3D data, and updates the virtual display or scene in the case of scenegraph applications. The master node typically does no rendering. Because it transmits data changes to other visualization nodes, it must be able to communicate with these nodes using the cluster SI. The SI is the fastest network available to the SVA and is the best choice for internode communication when performance is important.
A different scenario does not use a master application node. Instead, an application relies on Distributed
Other scenarios arise depending on the application and the capabilities of visualization middleware running on the SVA. For example, several render nodes can carry out rendering and compositing tasks. The render nodes can rely on middleware software to handle the compositing of any partial images. The image data then flows to a display node before being sent to a display device or remote node, for example; a desktop display outside the SVA.
See Chapter 5 for other usage scenarios.
File Access
Visualization applications typically read data from files in response to user input. For example, after starting an application, you specify a data file to open and load. Without exiting the application, you can select additional data files to open and load, replacing or adding to the data already loaded. Much visualized data is static rather than
Although parallel visualization is a relatively new approach, some file access patterns that applications use include the following:
•Master portion of the application reads data from files and distributes data to visualization nodes using the SI.
•Visualization nodes all read data from the same files.
•Visualization nodes all read data from different files.
•Master writes data; for example, to save an animation sequence.
Dataset sizes can range from less than 1GB to more than 100GB. Some examples include seismic datasets that are 1GB to 128GB, and medical datasets that are 1GB to 50GB.
Applications access files using HP Scalable File Share (SFS) or NFS. When visualization nodes are integrated into a cluster with HP SFS, they access this file system using the SI. When HP SFS is in a separate cluster and not accessible by the SI, access is with GigE.
See the SVA System Administration Guide for more information.
20 SVA Architecture