4-5. Robot Calibration Mode
XXXX
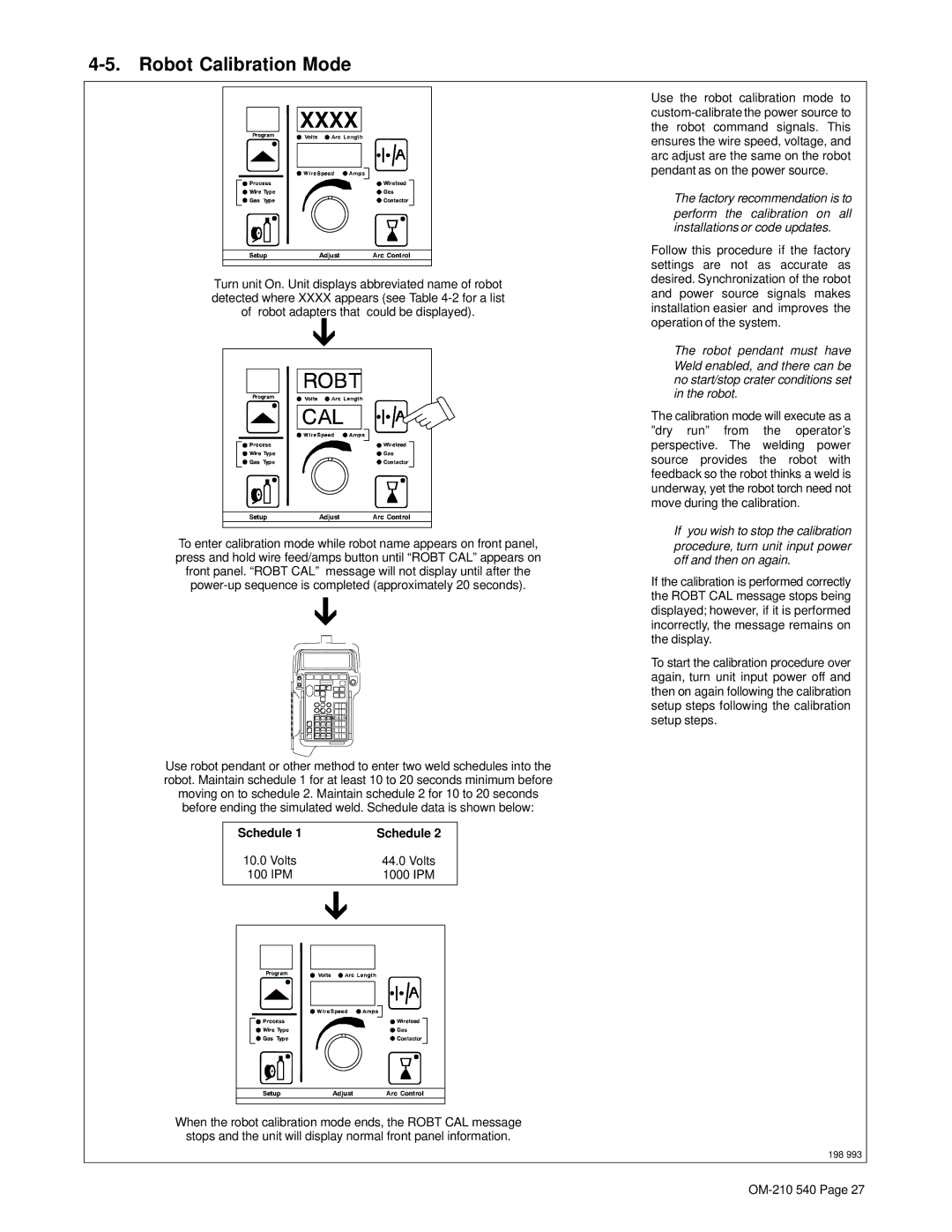
Turn unit On. Unit displays abbreviated name of robot detected where XXXX appears (see Table
To enter calibration mode while robot name appears on front panel, press and hold wire feed/amps button until “ROBT CAL” appears on front panel. “ROBT CAL” message will not display until after the
CIRCULER
Use robot pendant or other method to enter two weld schedules into the robot. Maintain schedule 1 for at least 10 to 20 seconds minimum before moving on to schedule 2. Maintain schedule 2 for 10 to 20 seconds before ending the simulated weld. Schedule data is shown below:
| Schedule 1 |
|
|
|
|
| Schedule 2 | |||||||||||
| 10.0 Volts |
|
|
|
|
| 44.0 Volts | |||||||||||
| 100 IPM |
|
|
|
|
| 1000 IPM | |||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
When the robot calibration mode ends, the ROBT CAL message stops and the unit will display normal front panel information.
Use the robot calibration mode to
.The factory recommendation is to perform the calibration on all installations or code updates.
Follow this procedure if the factory settings are not as accurate as desired. Synchronization of the robot and power source signals makes installation easier and improves the operation of the system.
.The robot pendant must have Weld enabled, and there can be no start/stop crater conditions set in the robot.
The calibration mode will execute as a ”dry run” from the operator’s perspective. The welding power source provides the robot with feedback so the robot thinks a weld is underway, yet the robot torch need not move during the calibration.
.If you wish to stop the calibration procedure, turn unit input power off and then on again.
If the calibration is performed correctly the ROBT CAL message stops being displayed; however, if it is performed incorrectly, the message remains on the display.
To start the calibration procedure over again, turn unit input power off and then on again following the calibration setup steps following the calibration setup steps.
198 993