(3) Motor Drive Circuits
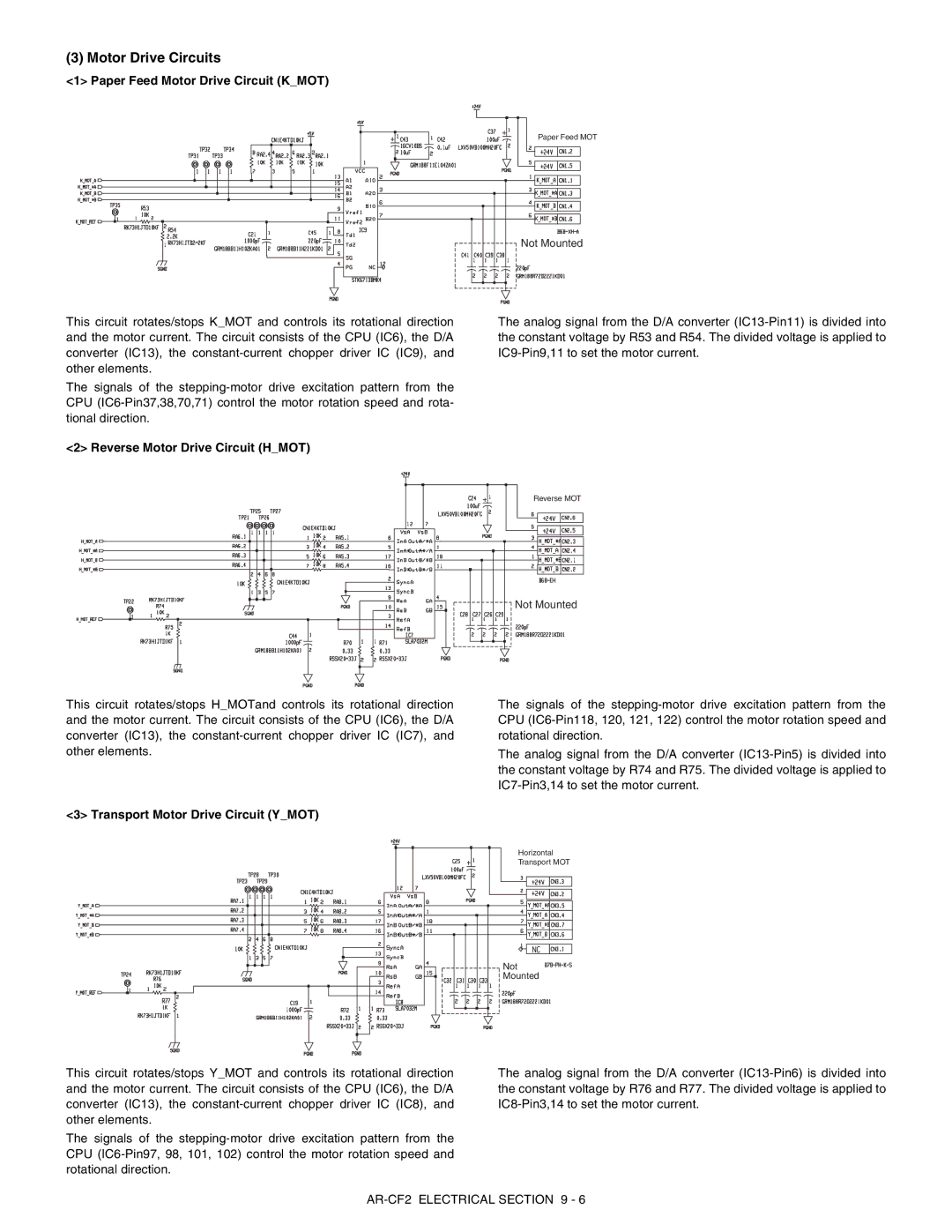
<1> Paper Feed Motor Drive Circuit (K_MOT)
Paper Feed MOT
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() Not Mounted
Not Mounted
This circuit rotates/stops K_MOT and controls its rotational direction and the motor current. The circuit consists of the CPU (IC6), the D/A converter (IC13), the
The signals of the
<2> Reverse Motor Drive Circuit (H_MOT)
The analog signal from the D/A converter
Reverse MOT
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() Not Mounted
Not Mounted
This circuit rotates/stops H_MOTand controls its rotational direction and the motor current. The circuit consists of the CPU (IC6), the D/A converter (IC13), the
The signals of the
The analog signal from the D/A converter
<3> Transport Motor Drive Circuit (Y_MOT)
Horizontal
Transport MOT
Not
Mounted
This circuit rotates/stops Y_MOT and controls its rotational direction and the motor current. The circuit consists of the CPU (IC6), the D/A converter (IC13), the
The signals of the
The analog signal from the D/A converter