Chapter 4 WIRING AND CONNECTION
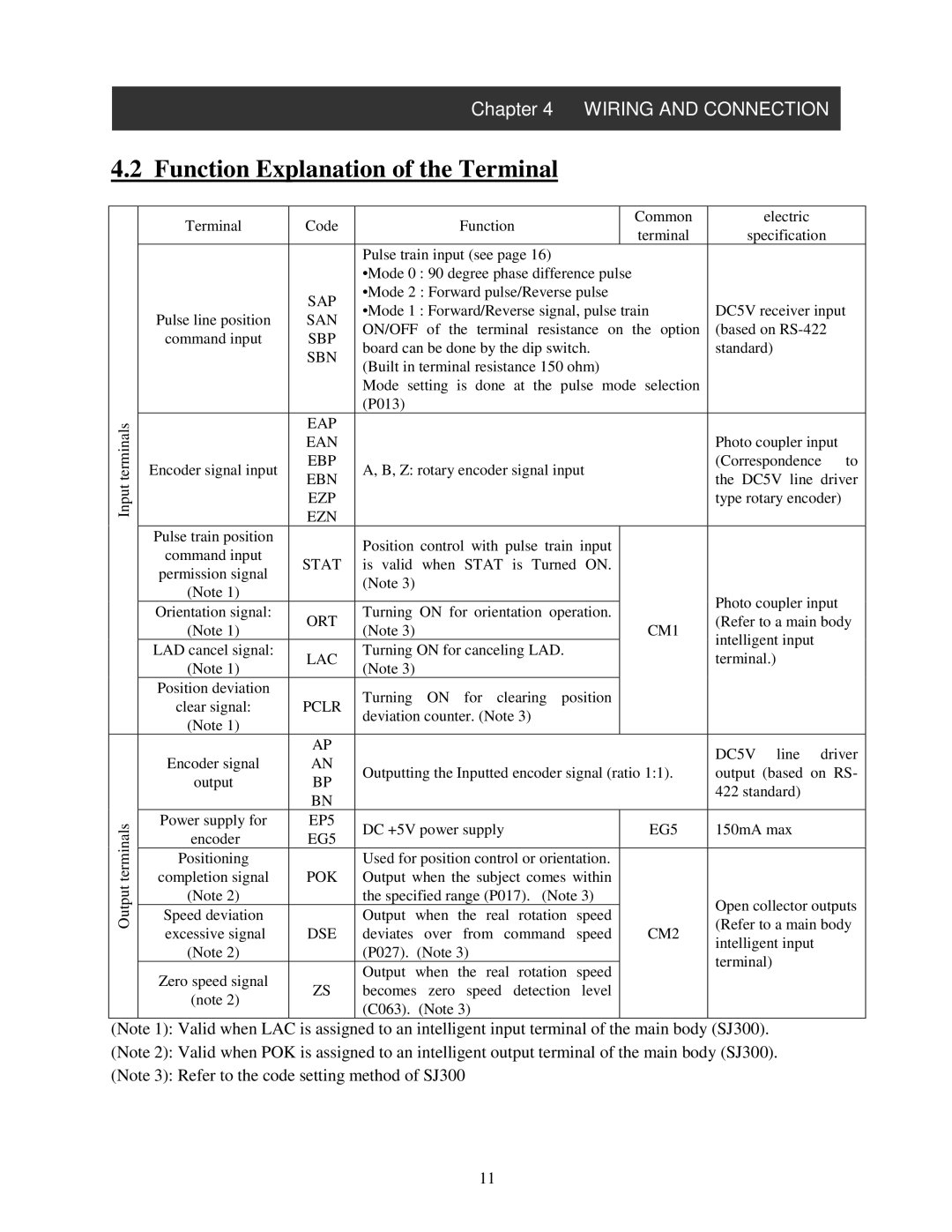
4.2 Function Explanation of the Terminal
Input terminals
Output terminals
Terminal | Code |
|
| Function |
|
|
| Common |
| electric |
|
| |||
|
|
|
|
| terminal | specification |
| ||||||||
|
|
|
|
|
|
|
|
|
|
| |||||
|
| Pulse train input (see page 16) |
|
|
|
|
|
|
| ||||||
|
| •Mode 0 : 90 degree phase difference pulse |
|
|
|
|
| ||||||||
| SAP | •Mode 2 : Forward pulse/Reverse pulse |
| DC5V receiver input | |||||||||||
| •Mode 1 : Forward/Reverse signal, pulse train | ||||||||||||||
Pulse line position | SAN | ||||||||||||||
ON/OFF | of the terminal resistance on | the option | (based on |
| |||||||||||
command input | SBP |
| |||||||||||||
board can be done by the dip switch. |
| standard) |
|
| |||||||||||
| SBN |
|
|
| |||||||||||
| (Built in terminal resistance 150 ohm) |
|
|
|
|
| |||||||||
|
|
|
|
|
|
| |||||||||
|
| Mode setting is done at the pulse mode selection |
|
|
|
| |||||||||
|
| (P013) |
|
|
|
|
|
|
|
|
|
|
|
| |
| EAP |
|
|
|
|
|
|
|
|
|
|
|
|
| |
| EAN |
|
|
|
|
|
|
|
|
| Photo coupler input | ||||
Encoder signal input | EBP | A, B, Z: rotary encoder signal input |
| (Correspondence | to | ||||||||||
EBN |
| the DC5V line driver | |||||||||||||
|
|
|
|
|
|
|
|
|
| ||||||
| EZP |
|
|
|
|
|
|
|
|
| type rotary encoder) | ||||
| EZN |
|
|
|
|
|
|
|
|
|
|
|
|
| |
Pulse train position |
| Position control with pulse train input |
|
|
|
|
|
| |||||||
command input |
|
|
|
|
|
|
| ||||||||
STAT | is valid | when | STAT | is Turned ON. |
|
|
|
|
|
| |||||
permission signal |
|
|
|
|
|
| |||||||||
| (Note 3) |
|
|
|
|
|
|
|
|
|
|
|
| ||
(Note 1) |
|
|
|
|
|
|
|
|
| Photo coupler input | |||||
|
|
|
|
|
|
|
|
|
| ||||||
Orientation signal: | ORT | Turning | ON for orientation | operation. |
|
| |||||||||
|
| (Refer to a main body | |||||||||||||
(Note 1) | (Note 3) |
|
|
|
|
|
|
| CM1 | ||||||
|
|
|
|
|
|
|
| intelligent input |
| ||||||
LAD cancel signal: |
| Turning ON for canceling LAD. |
|
|
|
| |||||||||
LAC |
|
|
| terminal.) |
|
| |||||||||
(Note 1) | (Note 3) |
|
|
|
|
|
|
|
|
|
| ||||
|
|
|
|
|
|
|
|
|
|
|
|
| |||
Position deviation |
| Turning | ON | for | clearing | position |
|
|
|
|
|
| |||
clear signal: | PCLR |
|
|
|
|
|
| ||||||||
deviation counter. (Note 3) |
|
|
|
|
|
|
|
| |||||||
(Note 1) |
|
|
|
|
|
|
|
|
| ||||||
AP |
|
|
|
|
|
|
|
|
|
|
|
|
| ||
|
|
|
|
|
|
|
|
|
| DC5V | line | driver | |||
Encoder signal | AN |
|
|
|
|
|
|
|
|
| |||||
Outputting the Inputted encoder signal (ratio 1:1). | output | (based | on | RS- | |||||||||||
output | BP | ||||||||||||||
|
|
|
|
|
|
|
|
| 422 standard) |
|
| ||||
| BN |
|
|
|
|
|
|
|
|
|
|
| |||
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||
Power supply for | EP5 | DC +5V power supply |
|
|
|
| EG5 | 150mA max |
|
| |||||
encoder | EG5 |
|
|
|
|
|
| ||||||||
|
|
|
|
|
|
|
|
|
|
|
|
| |||
Positioning |
| Used for position control or orientation. |
|
|
|
|
|
| |||||||
completion signal | POK | Output when the subject comes within |
|
|
|
|
|
| |||||||
(Note 2) |
| the specified range (P017). (Note 3) |
|
| Open collector outputs | ||||||||||
Speed deviation |
| Output when | the | real | rotation | speed |
|
| |||||||
|
| CM2 | (Refer to a main body | ||||||||||||
excessive signal | DSE | deviates | over | from command | speed |
| |||||||||
| intelligent input |
| |||||||||||||
(Note 2) |
| (P027). (Note 3) |
|
|
|
|
|
|
| ||||||
|
|
|
|
|
|
| terminal) |
|
| ||||||
Zero speed signal |
| Output when | the | real | rotation | speed |
|
|
|
| |||||
|
|
|
|
|
|
| |||||||||
ZS | becomes | zero | speed | detection | level |
|
|
|
|
|
| ||||
(note 2) |
|
|
|
|
|
| |||||||||
| (C063). (Note 3) |
|
|
|
|
|
|
|
|
|
| ||||
|
|
|
|
|
|
|
|
|
|
|
| ||||
(Note 1): Valid when LAC is assigned to an intelligent input terminal of the main body (SJ300).
(Note 2): Valid when POK is assigned to an intelligent output terminal of the main body (SJ300).
(Note 3): Refer to the code setting method of SJ300
11