Chapter 4 WIRING AND CONNECTION
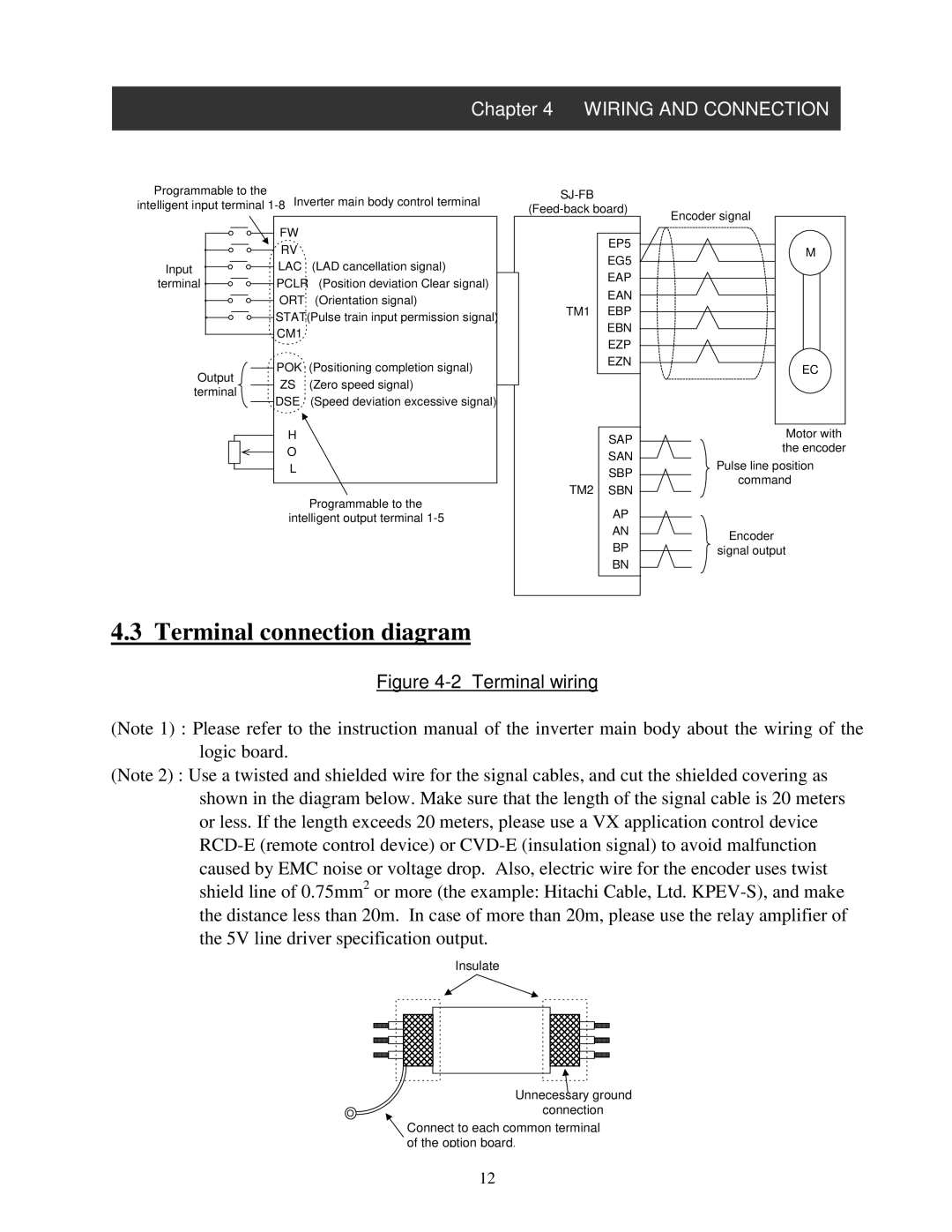
Programmable to the
intelligent input terminal
| FW |
| |
| RV |
| |
Input | LAC | (LAD cancellation signal) | |
terminal | PCLR | (Position deviation Clear signal) | |
| ORT | (Orientation signal) | |
| STAT(Pulse train input permission signal) | ||
| CM1 |
| |
Output | POK | (Positioning completion signal) | |
ZS | (Zero speed signal) | ||
terminal | |||
DSE | (Speed deviation excessive signal) | ||
| |||
H
O
L
Programmable to the intelligent output terminal
EP5
EG5
EAP
EAN
TM1 EBP
EBN
EZP
EZN
SAP
SAN
SBP
TM2 SBN
AP
AN
BP
BN
Encoder signal
M |
EC |
Motor with the encoder
Pulse line position
command
Encoder signal output
4.3 Terminal connection diagram
Figure 4-2 Terminal wiring
(Note 1) : Please refer to the instruction manual of the inverter main body about the wiring of the logic board.
(Note 2) : Use a twisted and shielded wire for the signal cables, and cut the shielded covering as shown in the diagram below. Make sure that the length of the signal cable is 20 meters or less. If the length exceeds 20 meters, please use a VX application control device
Insulate
Unnecessary ground
connection
Connect to each common terminal of the option board.
12