Chapter 7 FUNCTIONS
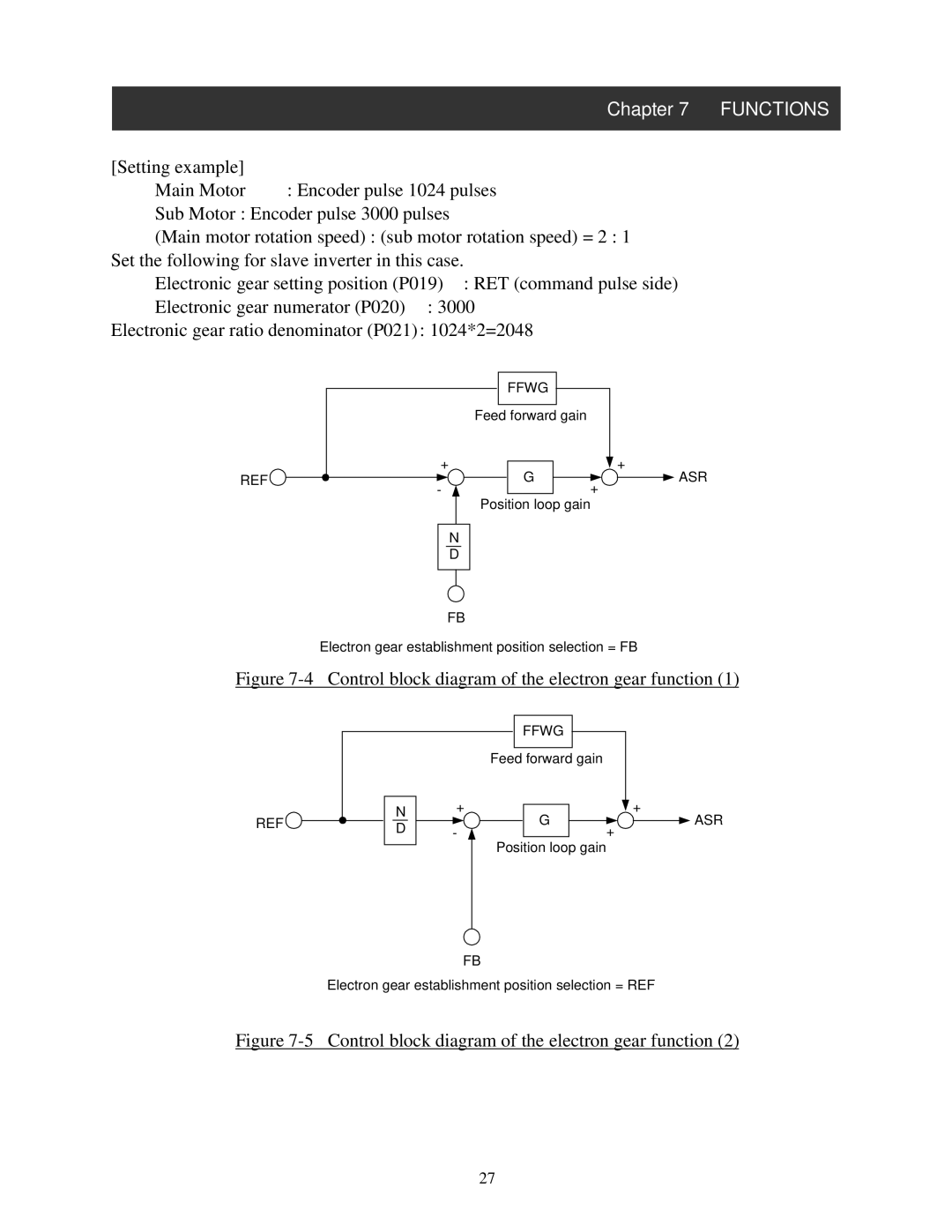
[Setting example] |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Main Motor | : Encoder pulse 1024 pulses |
| ||||||||||||||||
Sub Motor : Encoder pulse 3000 pulses |
|
|
|
|
|
|
|
|
|
|
|
| ||||||
(Main motor rotation speed) : (sub motor rotation speed) = 2 : 1 |
| |||||||||||||||||
Set the following for slave inverter in this case. |
|
|
|
|
|
|
|
|
|
|
|
| ||||||
Electronic gear setting position (P019) | : RET (command pulse side) |
| ||||||||||||||||
Electronic gear numerator (P020) : 3000 |
| |||||||||||||||||
Electronic gear ratio denominator (P021): 1024*2=2048 |
| |||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||
|
|
|
|
|
|
|
|
|
| FFWG |
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||
|
|
|
|
|
|
|
| Feed forward gain |
|
|
| |||||||
|
| + |
|
|
|
|
|
|
|
| + |
|
| |||||
|
|
|
|
|
|
|
|
|
| |||||||||
REF |
|
|
| G | ASR | |||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||
- |
|
|
|
|
|
| + |
|
|
|
| |||||||
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||
|
|
|
|
|
| |||||||||||||
|
|
|
|
|
|
|
| Position loop gain |
| |||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| N |
|
|
|
|
|
|
|
|
|
|
|
| ||
|
|
|
| D |
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
FB
Electron gear establishment position selection = FB
Figure 7-4 Control block diagram of the electron gear function (1)
REF![]()
N
D
FFWG
Feed forward gain
+ |
| + |
G | + | ASR |
- |
| |
Position loop gain |
|
|
FB
Electron gear establishment position selection = REF
Figure 7-5 Control block diagram of the electron gear function (2)
27