| Chapter 7 |
| FUNCTIONS |
| ||
|
|
|
|
|
|
|
|
|
|
|
| ||
7.1 | Orientation function |
|
| Relation |
| |
|
|
| ||||
A044: 1st Control Method |
| |||||
This | board is provided with the orientation function used to | P014: Orientation Stop Position | ||||
P015: Orientation Speed setting | ||||||
position the motor at a certain point during operation. This function | P016: | Orientation Direction | ||||
setting |
|
|
|
| ||
can be used for replacing a component of the main axis of the | P017: Completion range setting | |||||
|
| |||||
subject machine tool for example. | P018: Completion delay time | |||||
P023: Position loop gain | ||||||
7.1.1 | Function outline | |||||
terminal |
|
|
|
| ||
The orientation function maintains position which has decided with | ||||||
|
| terminal | ||||
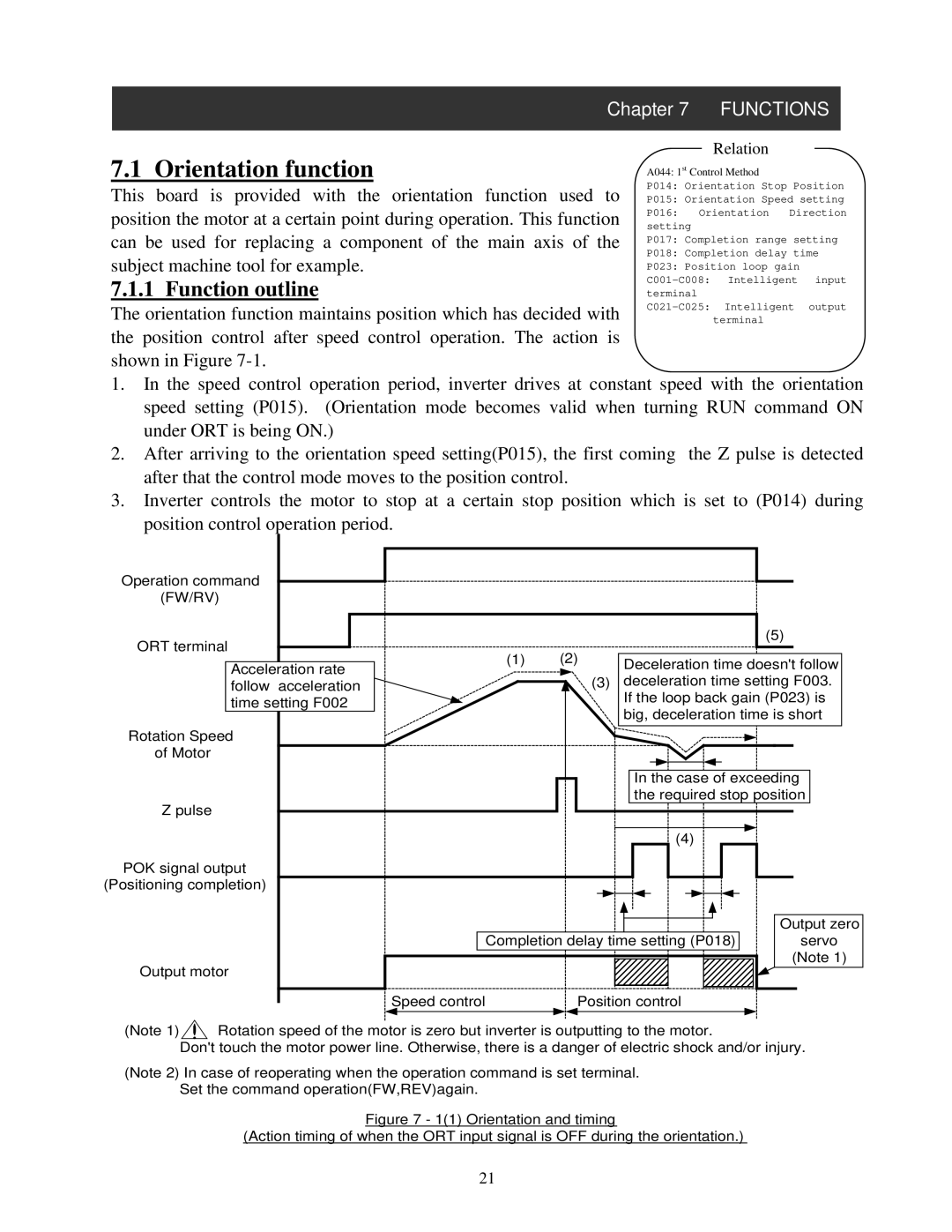
the position control after speed control operation. The action is shown in Figure
1.In the speed control operation period, inverter drives at constant speed with the orientation speed setting (P015). (Orientation mode becomes valid when turning RUN command ON under ORT is being ON.)
2.After arriving to the orientation speed setting(P015), the first coming the Z pulse is detected after that the control mode moves to the position control.
3.Inverter controls the motor to stop at a certain stop position which is set to (P014) during position control operation period.
Operation command |
|
|
|
| ||
(FW/RV) |
|
|
|
| ||
ORT terminal |
|
|
| (5) | ||
(1) | (2) | Deceleration time doesn't follow | ||||
| Acceleration rate | |||||
|
| (3) | deceleration time setting F003. | |||
| follow acceleration |
| ||||
| time setting F002 |
|
| If the loop back gain (P023) is | ||
|
|
| big, deceleration time is short | |||
|
|
|
| |||
Rotation Speed |
|
|
|
| ||
of Motor |
|
|
|
|
| |
|
|
|
| In the case of exceeding | ||
Z pulse |
|
|
| the required stop position | ||
|
|
|
|
| ||
|
|
|
| (4) |
| |
POK signal output |
|
|
|
| ||
(Positioning completion) |
|
|
|
| ||
|
| Completion delay time setting (P018) | Output zero | |||
|
| servo | ||||
Output motor |
|
|
| (Note 1) | ||
|
|
|
| |||
|
| Speed control | Position control |
| ||
(Note 1) | Rotation speed of the motor is zero but inverter is outputting to the motor. |
| ||||
Don't touch the motor power line. Otherwise, there is a danger of electric shock and/or injury.
(Note 2) In case of reoperating when the operation command is set terminal. Set the command operation(FW,REV)again.
Figure 7 - 1(1) Orientation and timing
(Action timing of when the ORT input signal is OFF during the orientation.)
21