Chapter 7 FUNCTIONS
7.4 Speed control (P/PI) switching function
Relation
Speed control mode is normally controlled by proportional- | A044: 1st Control Method |
P052: 1st Proportional gain | |
integration compensation (Pi), which keeps the deviation between | |
the actual speed and speed command becomes 0. Further, you can |
|
also achieve a propotional control function, which can be used as drooping operation (i.e. one load with several inverters) with this option card.
Set P/PI switching function to one of the intelligent input terminal 1∼ 8 by the operator to achieve this function. (Input ‘43’ in one of C001∼ C008.) When this is turned on, control mode becomes proportion control (P).
Please set proportional gain(Kpp ; a value used to decide the speed change rate) to H052 by a digital operator. The relationship between the Kpp value and the speed change rate is shown below.
10
(Speed Change Rate) = (Kpp Set Value) (%)
Relationship between Kpp Value and Speed Change Rate
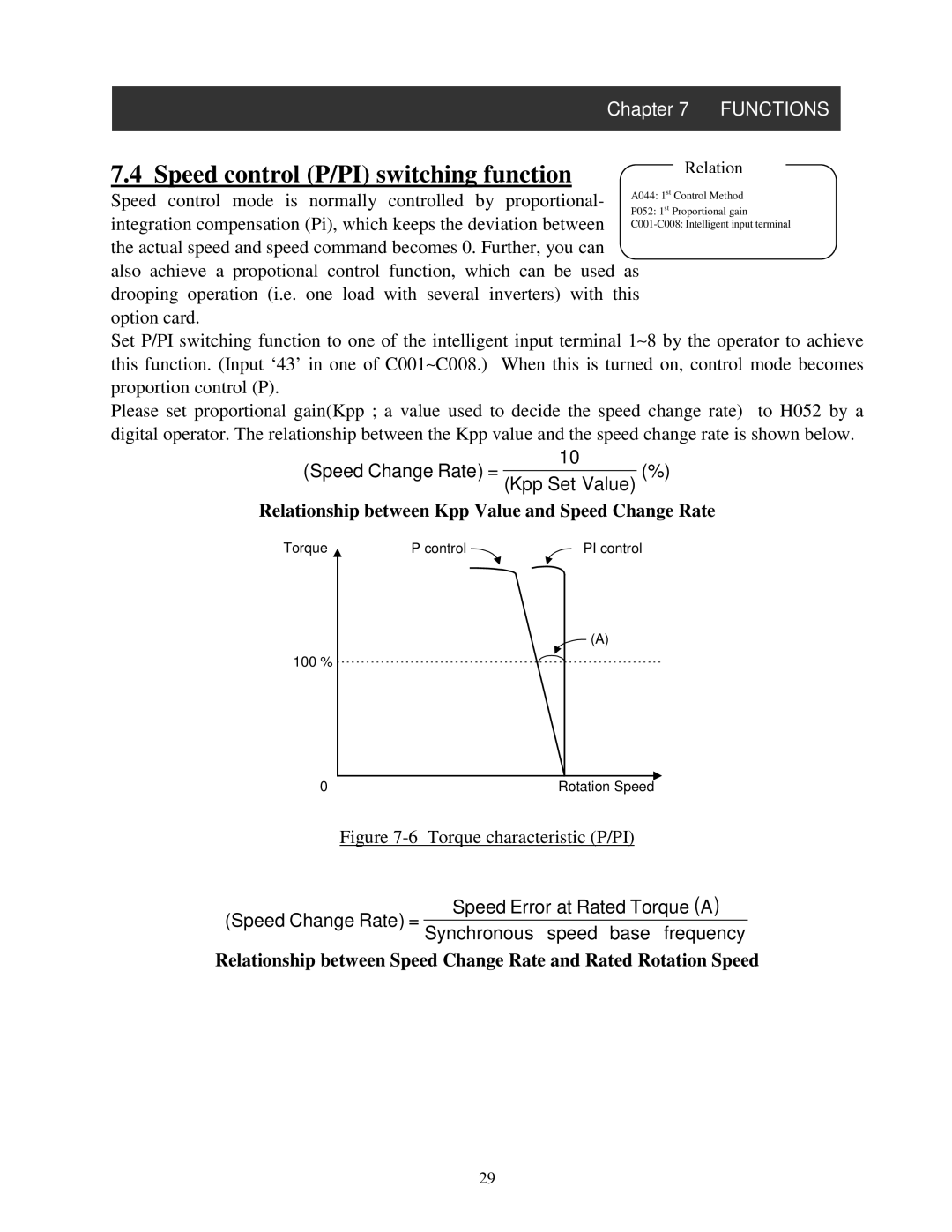
Torque
100%
0
P control | PI control |
(A)
Rotation Speed
Figure 7-6 Torque characteristic (P/PI)
Speed Error at Rated Torque (A)
(Speed Change Rate) = Synchronous speed base frequency
Relationship between Speed Change Rate and Rated Rotation Speed
29