Velocity |
|
|
|
|
| target_position X2 |
|
V2 |
|
|
|
| target_position X1 |
|
|
V1 |
|
|
|
T0 | T1 T2 | T3 | Time |
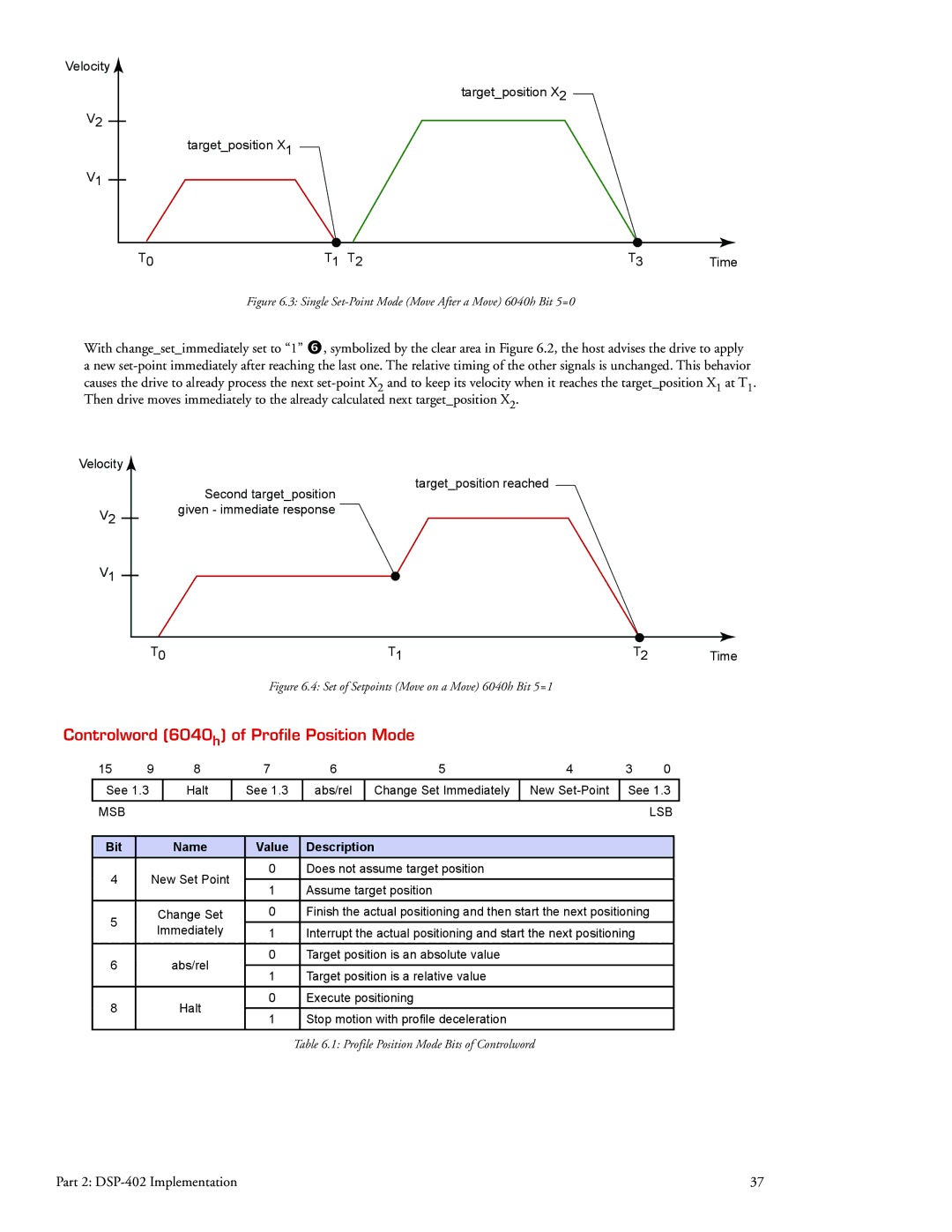
Figure 6.3: Single Set-Point Mode (Move After a Move) 6040h Bit 5=0
With change_set_immediately set to “1” , symbolized by the clear area in Figure 6.2, the host advises the drive to apply a new
Velocity |
|
|
|
| Second target_position | target_position reached |
|
|
|
| |
V2 | given - immediate response |
|
|
|
|
| |
V1 |
|
|
|
T0 | T1 | T2 | Time |
Figure 6.4: Set of Setpoints (Move on a Move) 6040h Bit 5=1
Controlword (6040h) of Profile Position Mode
15 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 0 |
| ||
See 1.3 |
| Halt |
| See 1.3 | abs/rel | Change Set Immediately | New | See 1.3 | |||
MSB |
|
|
|
|
|
|
|
|
| LSB | |
|
|
|
|
|
|
|
|
|
|
| |
Bit |
|
| Name |
| Value | Description |
|
|
|
| |
4 | New Set Point |
| 0 | Does not assume target position |
|
|
|
| |||
| 1 | Assume target position |
|
|
|
| |||||
|
|
|
|
|
|
|
|
| |||
5 |
| Change Set |
| 0 | Finish the actual positioning and then start the next positioning |
| |||||
| Immediately |
| 1 | Interrupt the actual positioning and start the next positioning |
|
| |||||
|
|
|
|
| |||||||
6 |
|
| abs/rel |
| 0 | Target position is an absolute value |
|
|
|
| |
|
|
|
|
|
|
|
|
|
| ||
|
|
| 1 | Target position is a relative value |
|
|
|
| |||
|
|
|
|
|
|
|
|
| |||
8 |
|
| Halt |
| 0 | Execute positioning |
|
|
|
| |
|
|
| 1 | Stop motion with profile deceleration |
|
|
|
| |||
|
|
|
|
|
|
|
|
| |||
Table 6.1: Profile Position Mode Bits of Controlword
Part 2: | 37 |