SECTION 7
Homing Mode
General Information
This chapter describes the method by which a drive seeks the home position (also called, the datum, reference point or zero point). There are various methods of achieving this using limit switches at the ends of travel or a home switch (zero point switch) in
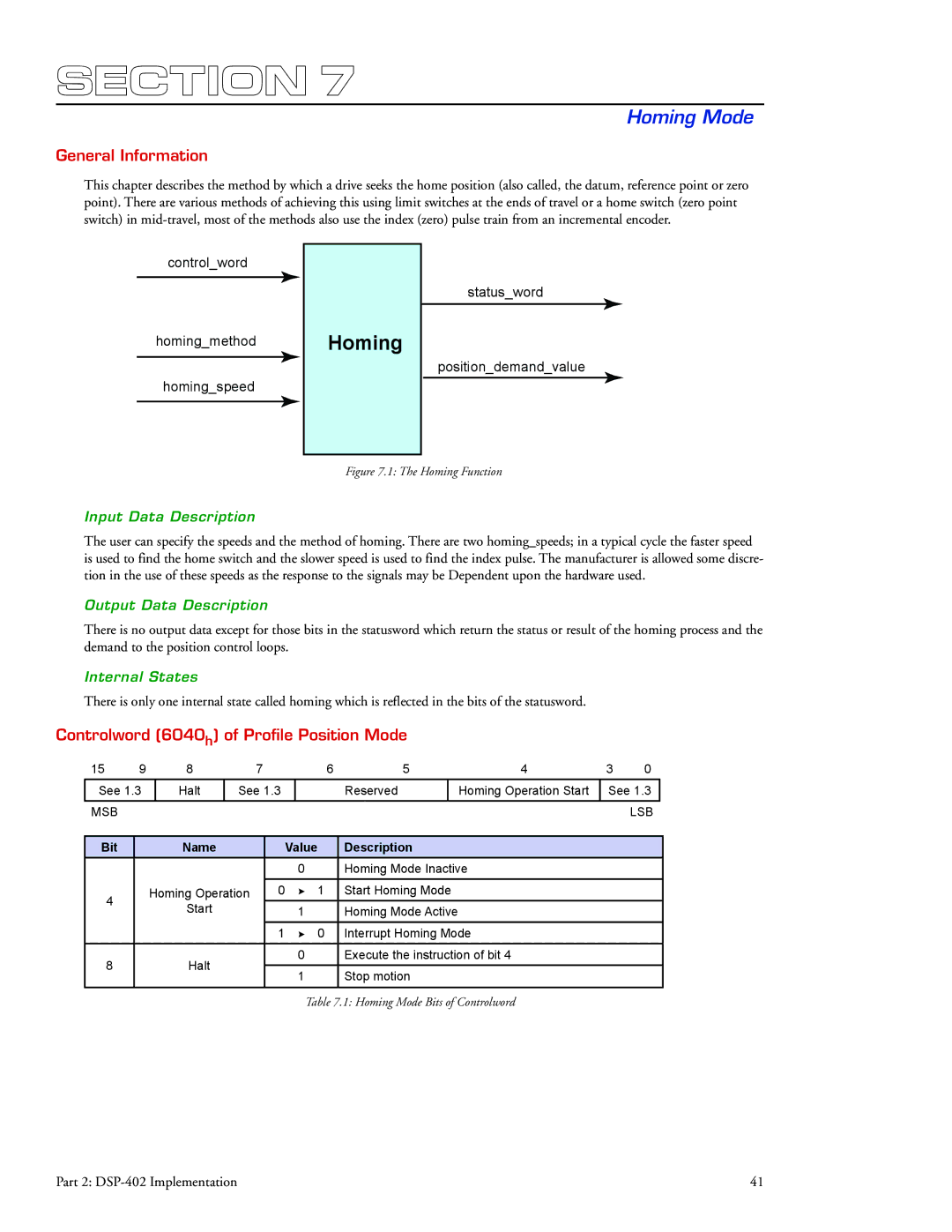
control_word
homing_method
homing_speed
Homing
status_word
position_demand_value
Figure 7.1: The Homing Function
Input Data Description
The user can specify the speeds and the method of homing. There are two homing_speeds; in a typical cycle the faster speed is used to find the home switch and the slower speed is used to find the index pulse. The manufacturer is allowed some discre- tion in the use of these speeds as the response to the signals may be Dependent upon the hardware used.
Output Data Description
There is no output data except for those bits in the statusword which return the status or result of the homing process and the demand to the position control loops.
Internal States
There is only one internal state called homing which is reflected in the bits of the statusword.
Controlword (6040h) of Profile Position Mode
15 | 9 | 8 |
| 7 |
|
|
| 6 | 5 |
| 4 | 3 | 0 |
| |
See 1.3 |
| Halt | See 1.3 |
|
|
| Reserved |
| Homing Operation Start | See 1.3 |
| ||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
MSB |
|
|
|
|
|
|
|
|
|
|
|
|
| LSB |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||
Bit |
|
| Name |
|
|
| Value |
| Description |
|
|
|
| ||
|
|
|
|
|
|
| 0 |
| Homing Mode Inactive |
|
|
| |||
4 |
| Homing Operation |
| 0 |
| | 1 | Start Homing Mode |
|
|
|
| |||
|
| Start |
|
|
| 1 |
| Homing Mode Active |
|
|
|
| |||
|
|
|
|
|
|
|
|
|
|
| |||||
|
|
|
|
|
| 1 |
| | 0 | Interrupt Homing Mode |
|
|
| ||
8 |
|
| Halt |
|
|
| 0 |
| Execute the instruction of bit 4 |
|
|
| |||
|
|
|
|
| 1 |
| Stop motion |
|
|
|
| ||||
|
|
|
|
|
|
|
|
|
|
|
| ||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Table 7.1: Homing Mode Bits of Controlword
Part 2: | 41 |