SECTION 1
Introduction to the MDrivePlus CANopen
Introduction
This document describes the Operational Modes and Objects utilized by the MDrivePlus CANopen. The MDrivePlus uses the CiA DSP402 protocol as described the the CiA document CANopen Device Profile for Drives and Motion Control V2.0B.
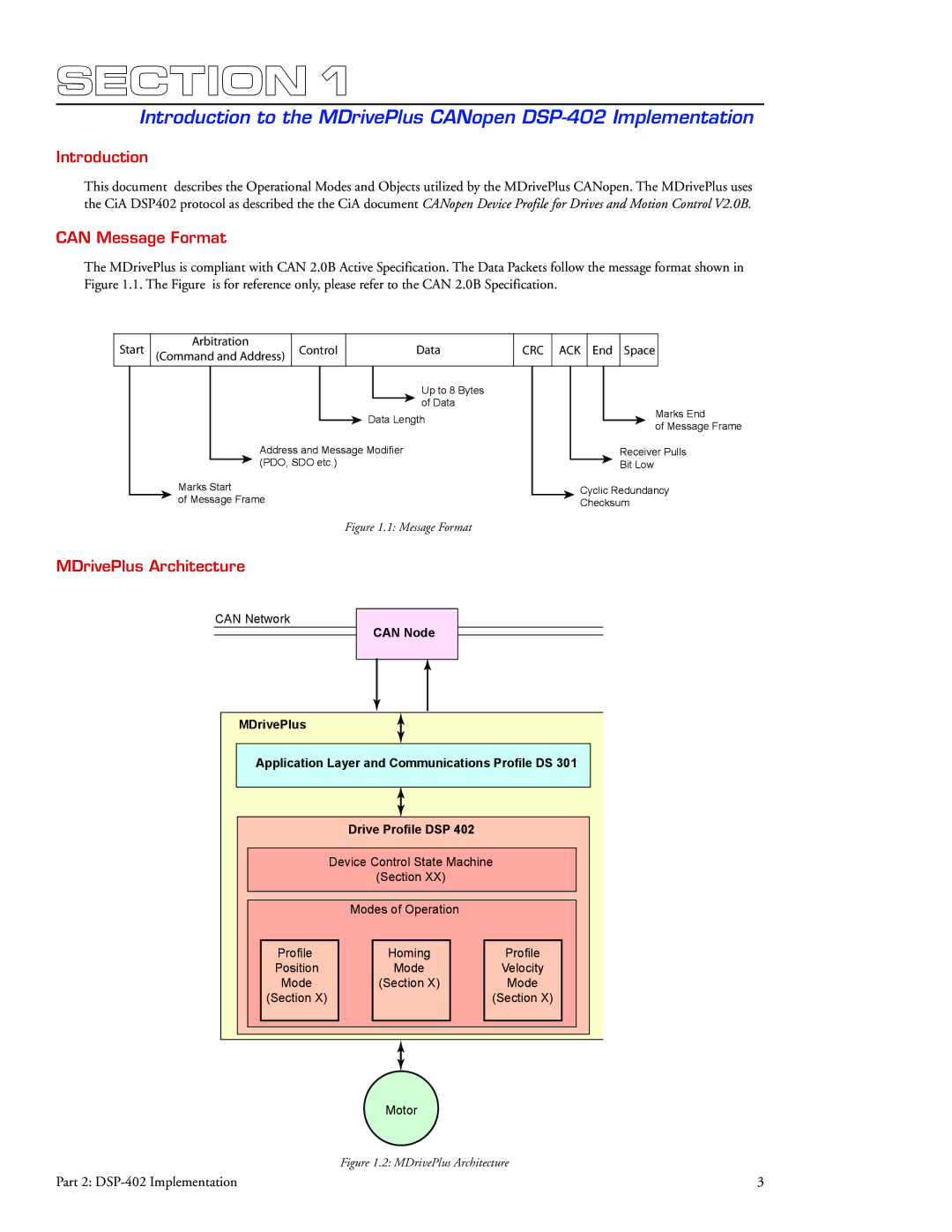
CAN Message Format
The MDrivePlus is compliant with CAN 2.0B Active Specification. The Data Packets follow the message format shown in Figure 1.1. The Figure is for reference only, please refer to the CAN 2.0B Specification.
Start
Arbitration
(Command and Address)
Control
Data
CRC
ACK End
Space
Up to 8 Bytes of Data
![]() Data Length
Data Length
Address and Message Modifier (PDO, SDO etc.)
Marks Start
of Message Frame
Marks End
of Message Frame
Receiver Pulls
Bit Low
Cyclic Redundancy
Checksum
Figure 1.1: Message Format
MDrivePlus Architecture
CAN Network
CAN Node
MDrivePlus
Application Layer and Communications Profile DS 301
Drive Profile DSP 402
Device Control State Machine
(Section XX)
|
| Modes of Operation |
|
| ||
|
|
|
|
|
|
|
| Profile |
| Homing |
| Profile |
|
| Position |
| Mode |
| Velocity |
|
| Mode |
| (Section X) |
| Mode |
|
| (Section X) |
|
|
| (Section X) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Motor
Figure 1.2: MDrivePlus Architecture
Part 2: