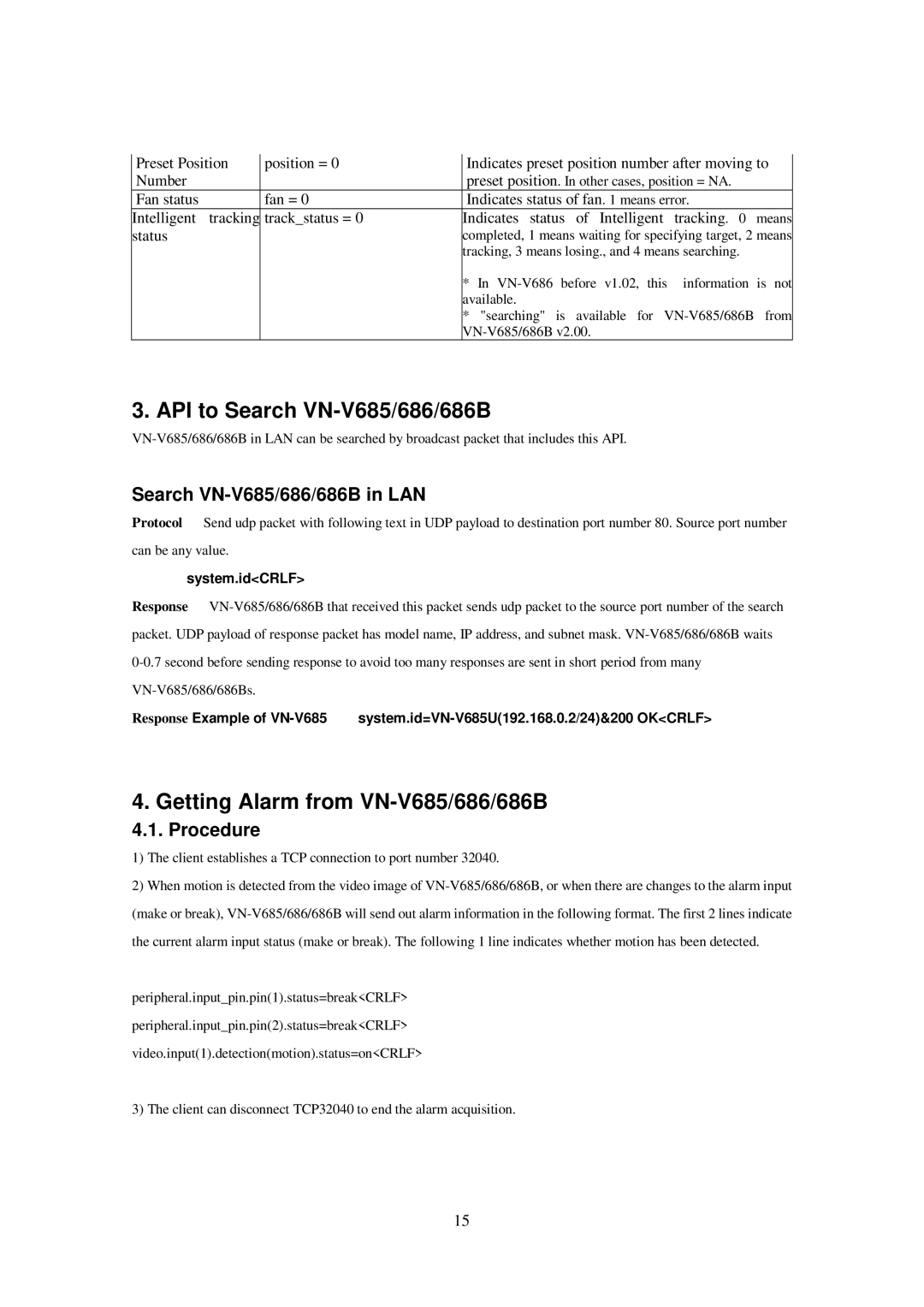
Preset Position | position = 0 | Indicates preset position number after moving to | |
Number |
| preset position. In other cases, position = NA. |
|
Fan status | fan = 0 | Indicates status of fan. 1 means error. |
|
Intelligent tracking | track_status = 0 | Indicates status of Intelligent tracking. 0 means | |
status |
| completed, 1 means waiting for specifying target, 2 means | |
|
| tracking, 3 means losing., and 4 means searching. |
|
|
| * In | is not |
|
| available. |
|
|
| * "searching" is available for | from |
|
|
| |
3. API to Search VN-V685/686/686B
Search VN-V685/686/686B in LAN
Protocol Send udp packet with following text in UDP payload to destination port number 80. Source port number can be any value.
system.id<CRLF>
Response
Response Example of
4. Getting Alarm from VN-V685/686/686B
4.1. Procedure
1)The client establishes a TCP connection to port number 32040.
2)When motion is detected from the video image of
peripheral.input_pin.pin(1).status=break<CRLF> peripheral.input_pin.pin(2).status=break<CRLF> video.input(1).detection(motion).status=on<CRLF>
3) The client can disconnect TCP32040 to end the alarm acquisition.
15