Philips Semiconductors
Magnetoresistive sensors for
magnetic field measurement
General
The KMZ range of magnetoresistive sensors is characterized by high sensitivity in the detection of magnetic fields, a wide operating temperature range, a low and stable offset and low sensitivity to mechanical stress. They therefore provide an excellent means of measuring both linear and angular displacement under extreme environmental conditions, because their very high sensitivity means that a fairly small movement of actuating components in, for example, cars or machinery (gear wheels, metal rods, cogs, cams, etc.) can create measurable changes in magnetic field. Other applications for magnetoresistive sensors include rotational speed measurement and current measurement.
Examples where their properties can be put to good effect can be found in automotive applications, such as wheel speed sensors for ABS and motor management systems and position sensors for chassis position, throttle and pedal position measurement. Other examples include instrumentation and control equipment, which often require position sensors capable of detecting displacements in the region of tenths of a millimetre (or even less), and in electronic ignition systems, which must be able to determine the angular position of an internal combustion engine with great accuracy.
Finally, because of their high sensitivity, magnetoresistive sensors can measure very weak magnetic fields and are thus ideal for application in electronic compasses, earth field correction and traffic detection.
If the KMZ sensors are to be used to maximum advantage, however, it is important to have a clear understanding of their operating principles and characteristics, and how their behaviour may be affected by external influences and by their magnetic history.
handbook, halfpage | R = R0 |
|
| Δ R0 cos 2 α |
|
|
Permalloy
H
![]() α
α
Current I
MLC127
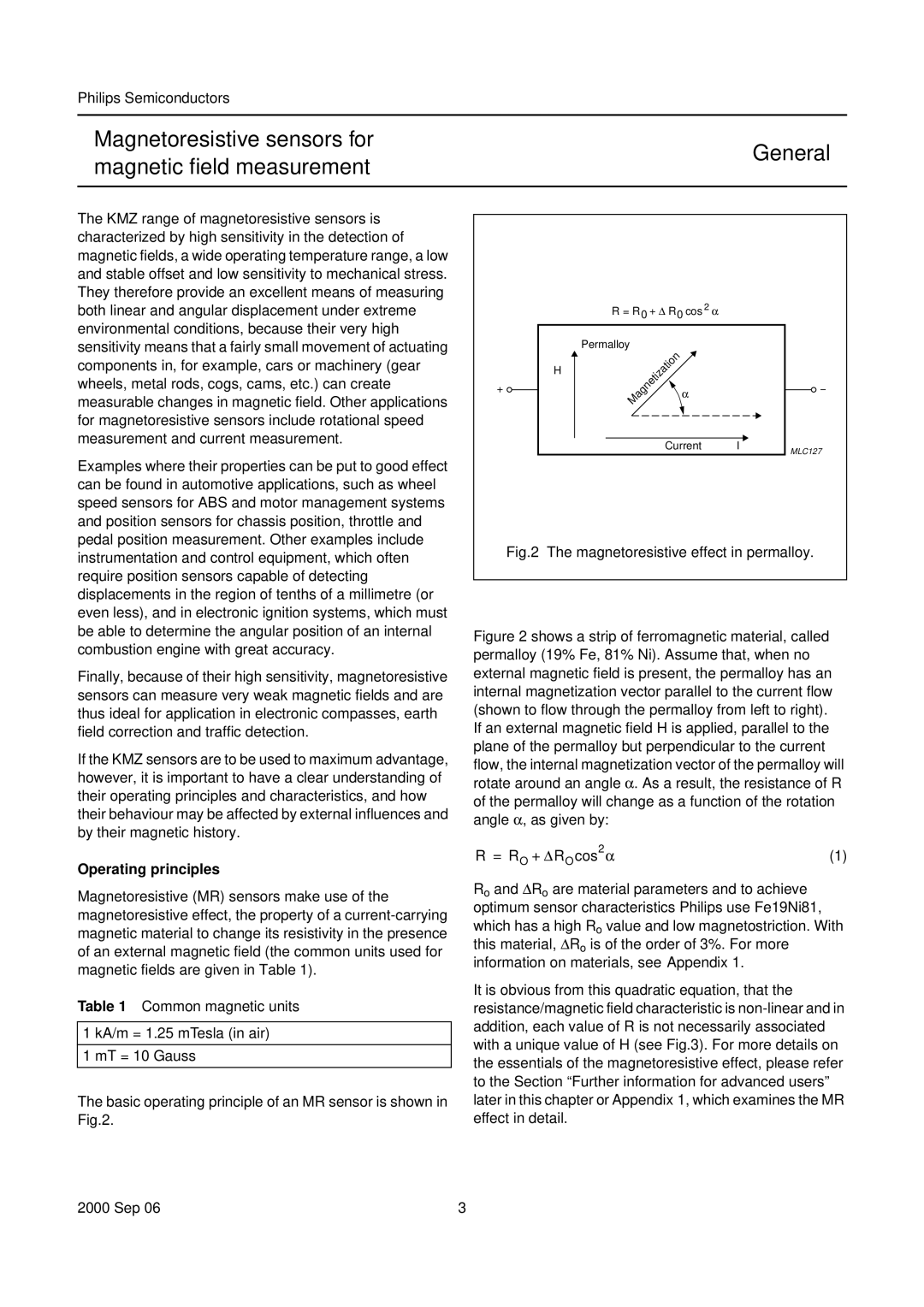
Fig.2 The magnetoresistive effect in permalloy.
Figure 2 shows a strip of ferromagnetic material, called permalloy (19% Fe, 81% Ni). Assume that, when no external magnetic field is present, the permalloy has an internal magnetization vector parallel to the current flow (shown to flow through the permalloy from left to right). If an external magnetic field H is applied, parallel to the plane of the permalloy but perpendicular to the current flow, the internal magnetization vector of the permalloy will rotate around an angle α. As a result, the resistance of R of the permalloy will change as a function of the rotation angle α, as given by:
R = RO + ΔRO cos2 α | (1) |
Operating principles |
|
Magnetoresistive (MR) sensors make use of the magnetoresistive effect, the property of a
Table 1 Common magnetic units
1 kA/m = 1.25 mTesla (in air)
1 mT = 10 Gauss
The basic operating principle of an MR sensor is shown in Fig.2.
Ro and ΔRo are material parameters and to achieve optimum sensor characteristics Philips use Fe19Ni81, which has a high Ro value and low magnetostriction. With this material, ΔRo is of the order of 3%. For more information on materials, see Appendix 1.
It is obvious from this quadratic equation, that the resistance/magnetic field characteristic is
2000 Sep 06 | 3 |