Philips Semiconductors
Magnetoresistive sensors for
magnetic field measurement
General
Flipping
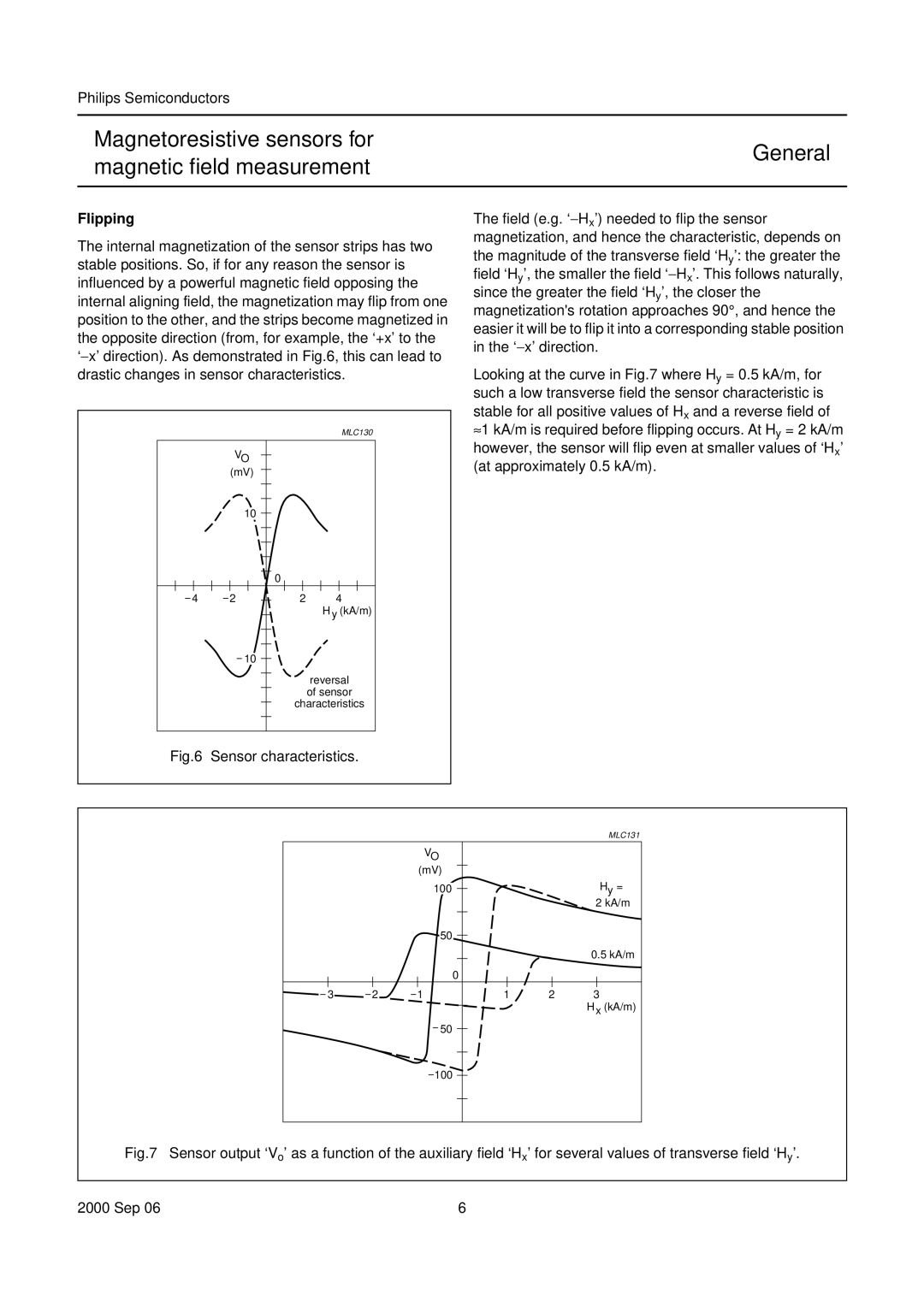
The internal magnetization of the sensor strips has two stable positions. So, if for any reason the sensor is influenced by a powerful magnetic field opposing the internal aligning field, the magnetization may flip from one position to the other, and the strips become magnetized in the opposite direction (from, for example, the ‘+x’ to the ‘−x’ direction). As demonstrated in Fig.6, this can lead to drastic changes in sensor characteristics.
The field (e.g. ‘−Hx’) needed to flip the sensor magnetization, and hence the characteristic, depends on the magnitude of the transverse field ‘Hy’: the greater the field ‘Hy’, the smaller the field ‘−Hx’. This follows naturally, since the greater the field ‘Hy’, the closer the magnetization's rotation approaches 90°, and hence the easier it will be to flip it into a corresponding stable position in the ‘−x’ direction.
Looking at the curve in Fig.7 where Hy = 0.5 kA/m, for such a low transverse field the sensor characteristic is stable for all positive values of Hx and a reverse field of ≈1 kA/m is required before flipping occurs. At H = 2 kA/m
handbook, halfpage
MLC130
VO
y
however, the sensor will flip even at smaller values of ‘Hx’ (at approximately 0.5 kA/m).
(mV)
10
|
|
|
|
|
|
|
|
| 0 |
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||
|
| 4 |
|
| 2 |
|
| 2 | 4 |
| |||||||
|
|
|
|
| |||||||||||||
| |||||||||||||||||
H y (kA/m)
10
reversal
of sensor
characteristics
Fig.6 Sensor characteristics.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| MLC131 |
|
|
|
|
|
|
|
|
|
|
|
| VO |
|
|
|
|
|
|
| ||||||
|
|
|
|
|
|
|
|
|
|
|
| (mV) |
|
|
|
|
|
| Hy = | ||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||||
|
|
|
|
|
|
|
|
|
|
| 1 |
|
|
|
|
|
|
| |||||||
|
|
|
|
|
|
|
|
|
|
| 00 |
|
|
|
|
|
| ||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 2 kA/m | |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||
|
|
|
|
|
|
|
|
|
|
| 50 |
|
|
|
|
| 0.5 kA/m | ||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 0 |
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||
|
|
| 3 |
|
|
| 2 |
|
| 1 |
|
|
|
|
|
|
|
| 1 | 2 | 3 | ||||
|
|
|
|
|
|
|
|
|
|
| |||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 50 |
|
|
|
|
| H x (kA/m) | |||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 100 |
|
|
|
|
|
|
| |||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fig.7 Sensor output ‘Vo’ as a function of the auxiliary field ‘Hx’ for several values of transverse field ‘Hy’.
2000 Sep 06 | 6 |