Philips Semiconductors
Magnetoresistive sensors for
magnetic field measurement
General
this also considerably enlarges Hk. If a small temperature
coefficient of Δρ is required, NiCo alloys are preferable. The amorphous alloy CoFeB has a low Δρ/ρ, high Hk and
slightly worse thermal stability but due to the absence of grain boundaries within the amorphous structure, exhibits excellent magnetic behaviour.
APPENDIX 2: SENSOR FLIPPING
During deposition of the permalloy strip, a strong external magnetic field is applied parallel to the strip axis. This accentuates the inherent magnetic anisotropy of the strip and gives them a preferred magnetization direction, so that even in the absence of an external magnetic field, the magnetization will always tend to align with the strips.
Providing a high level of premagnetization within the crystal structure of the permalloy allows for two stable premagnetization directions. When the sensor is placed in a controlled external magnetic field opposing the internal aligning field, the polarity of the premagnetization of the strips can be switched or ‘flipped’ between positive and negative magnetization directions, resulting in two stable output characteristics.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| MLC130 | ||
|
|
|
|
|
|
|
|
|
|
| VO |
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||||||
|
|
|
|
|
|
|
|
|
| (mV) |
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||
|
|
|
|
|
|
| 10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 0 |
|
|
|
|
|
|
|
|
|
|
| |
|
| 4 |
|
| 2 |
|
|
|
|
|
|
|
| 2 | 4 |
|
| ||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| H y (kA/m) | ||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
| 10 |
|
|
|
|
|
|
|
| reversal | |||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| of sensor | ||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| characteristics | |||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fig.21 Sensor characteristics.
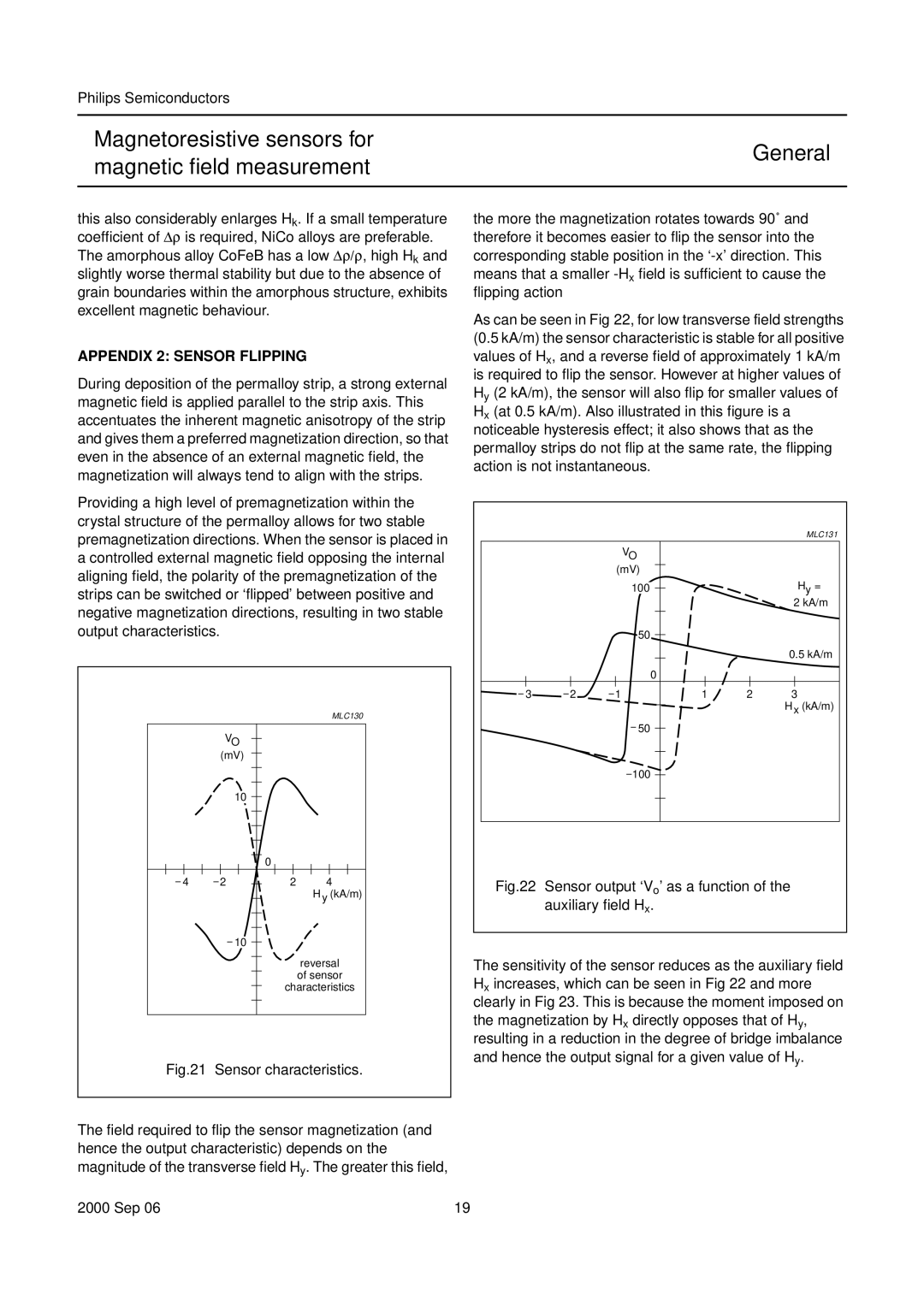
The field required to flip the sensor magnetization (and hence the output characteristic) depends on the magnitude of the transverse field Hy. The greater this field,
the more the magnetization rotates towards 90˚ and therefore it becomes easier to flip the sensor into the corresponding stable position in the
As can be seen in Fig 22, for low transverse field strengths (0.5 kA/m) the sensor characteristic is stable for all positive values of Hx, and a reverse field of approximately 1 kA/m is required to flip the sensor. However at higher values of Hy (2 kA/m), the sensor will also flip for smaller values of Hx (at 0.5 kA/m). Also illustrated in this figure is a noticeable hysteresis effect; it also shows that as the permalloy strips do not flip at the same rate, the flipping action is not instantaneous.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| MLC131 |
|
|
|
|
|
|
|
|
|
|
|
| VO |
|
|
|
|
|
|
| ||||||
|
|
|
|
|
|
|
|
|
|
|
| (mV) |
|
|
|
|
|
| Hy = | ||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||||
|
|
|
|
|
|
|
|
|
|
| 1 |
|
|
|
|
|
|
| |||||||
|
|
|
|
|
|
|
|
|
|
| 00 |
|
|
|
|
|
| ||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 2 kA/m | |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||
|
|
|
|
|
|
|
|
|
|
| 50 |
|
|
|
|
| 0.5 kA/m | ||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 0 |
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||
|
|
| 3 |
|
|
| 2 |
|
| 1 |
|
|
|
|
|
|
|
| 1 | 2 | 3 | ||||
|
|
|
|
|
|
|
|
|
|
| |||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 50 |
|
|
|
|
| H x (kA/m) | |||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 100 |
|
|
|
|
|
|
| |||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fig.22 Sensor output ‘Vo’ as a function of the auxiliary field Hx.
The sensitivity of the sensor reduces as the auxiliary field Hx increases, which can be seen in Fig 22 and more clearly in Fig 23. This is because the moment imposed on the magnetization by Hx directly opposes that of Hy, resulting in a reduction in the degree of bridge imbalance and hence the output signal for a given value of Hy.
2000 Sep 06 | 19 |