APPENDIX
Data sentences
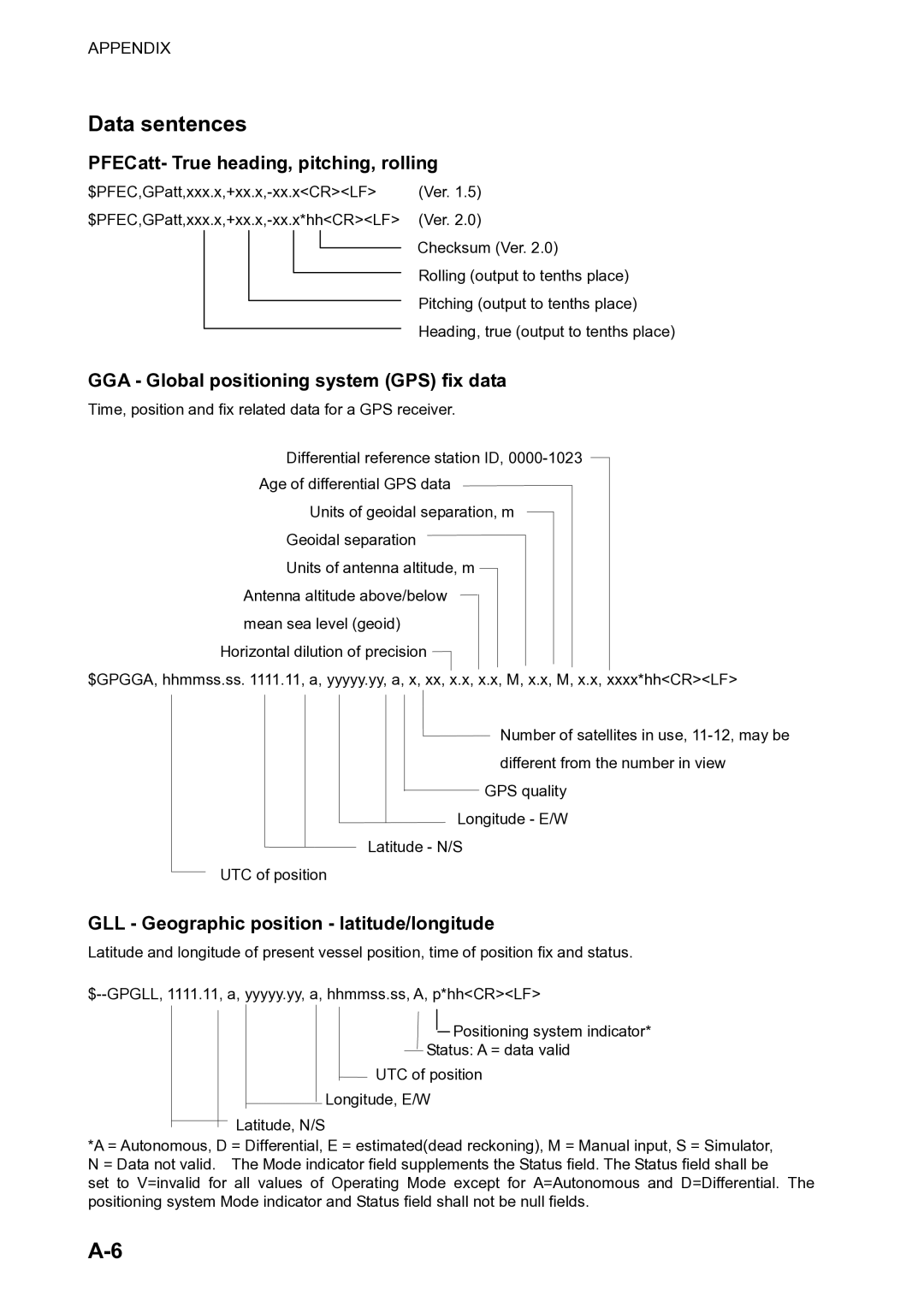
PFECatt- True heading, pitching, rolling
(Ver. 1.5) | |||||
(Ver. 2.0) | |||||
|
|
|
|
| Checksum (Ver. 2.0) |
|
|
|
|
| |
|
|
|
|
| Rolling (output to tenths place) |
|
|
|
|
| |
|
|
|
|
| Pitching (output to tenths place) |
|
|
|
|
| |
|
|
|
|
| Heading, true (output to tenths place) |
|
|
|
|
| |
GGA - Global positioning system (GPS) fix data
Time, position and fix related data for a GPS receiver.
Differential reference station ID,
Units of geoidal separation, m Geoidal separation
Units of antenna altitude, m Antenna altitude above/below mean sea level (geoid)
Horizontal dilution of precision
$GPGGA, hhmmss.ss. 1111.11, a, yyyyy.yy, a, x, xx, x.x, x.x, M, x.x, M, x.x, xxxx*hh<CR><LF>
Number of satellites in use,
GPS quality Longitude - E/W
Latitude - N/S
UTC of position
GLL - Geographic position - latitude/longitude
Latitude and longitude of present vessel position, time of position fix and status.
Positioning system indicator* Status: A = data valid
UTC of position Longitude, E/W
Latitude, N/S
*A = Autonomous, D = Differential, E = estimated(dead reckoning), M = Manual input, S = Simulator, N = Data not valid. The Mode indicator field supplements the Status field. The Status field shall be
set to V=invalid for all values of Operating Mode except for A=Autonomous and D=Differential. The positioning system Mode indicator and Status field shall not be null fields.