Sat measurement
|
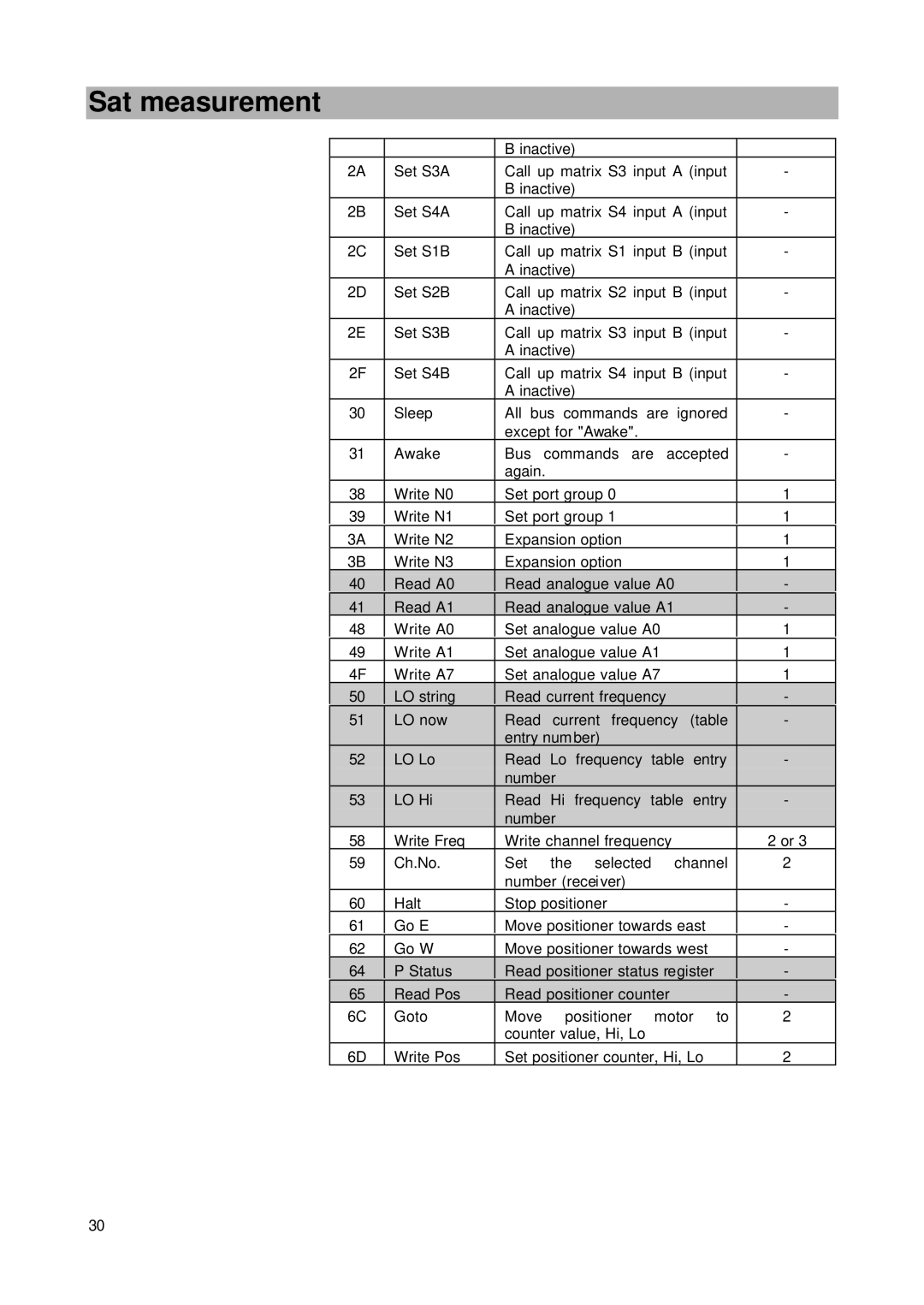
| B inactive) |
|
| |
2A | Set S3A | Call up matrix S3 input A (input | - | ||
|
| B inactive) |
|
| |
2B | Set S4A | Call up matrix S4 input A (input | - | ||
|
| B inactive) |
|
| |
2C | Set S1B | Call up matrix S1 input B (input | - | ||
|
| A inactive) |
|
| |
2D | Set S2B | Call up matrix S2 input B (input | - | ||
|
| A inactive) |
|
| |
2E | Set S3B | Call up matrix S3 input B (input | - | ||
|
| A inactive) |
|
| |
2F | Set S4B | Call up matrix S4 input B (input | - | ||
|
| A inactive) |
|
| |
30 | Sleep | All bus commands are ignored | - | ||
|
| except for "Awake". |
|
| |
31 | Awake | Bus | commands are | accepted | - |
|
| again. |
|
| |
38 | Write N0 | Set port group 0 |
| 1 | |
39 | Write N1 | Set port group 1 |
| 1 | |
3A | Write N2 | Expansion option |
| 1 | |
3B | Write N3 | Expansion option |
| 1 | |
40 | Read A0 | Read analogue value A0 | - | ||
41 | Read A1 | Read analogue value A1 | - | ||
48 | Write A0 | Set analogue value A0 | 1 | ||
49 | Write A1 | Set analogue value A1 | 1 | ||
4F | Write A7 | Set analogue value A7 | 1 | ||
50 | LO string | Read current frequency | - | ||
51 | LO now | Read | current frequency (table | - | |
|
| entry number) |
|
| |
52 | LO Lo | Read Lo frequency table entry | - | ||
|
| number |
|
| |
53 | LO Hi | Read Hi frequency table entry | - | ||
|
| number |
|
| |
58 | Write Freq | Write channel frequency | 2 or 3 | ||
59 | Ch.No. | Set | the selected | channel | 2 |
|
| number (receiver) |
|
| |
60 | Halt | Stop positioner |
| - | |
61 | Go E | Move positioner towards east | - | ||
62 | Go W | Move positioner towards west | - | ||
64 | P Status | Read positioner status register | - | ||
65 | Read Pos | Read positioner counter | - | ||
6C | Goto | Move | positioner | motor to | 2 |
|
| counter value, Hi, Lo |
|
| |
6D | Write Pos | Set positioner counter, Hi, Lo | 2 | ||
30