Manuals
/
Texas Instruments
/
Home Audio
/
Speaker System
Texas Instruments
manual
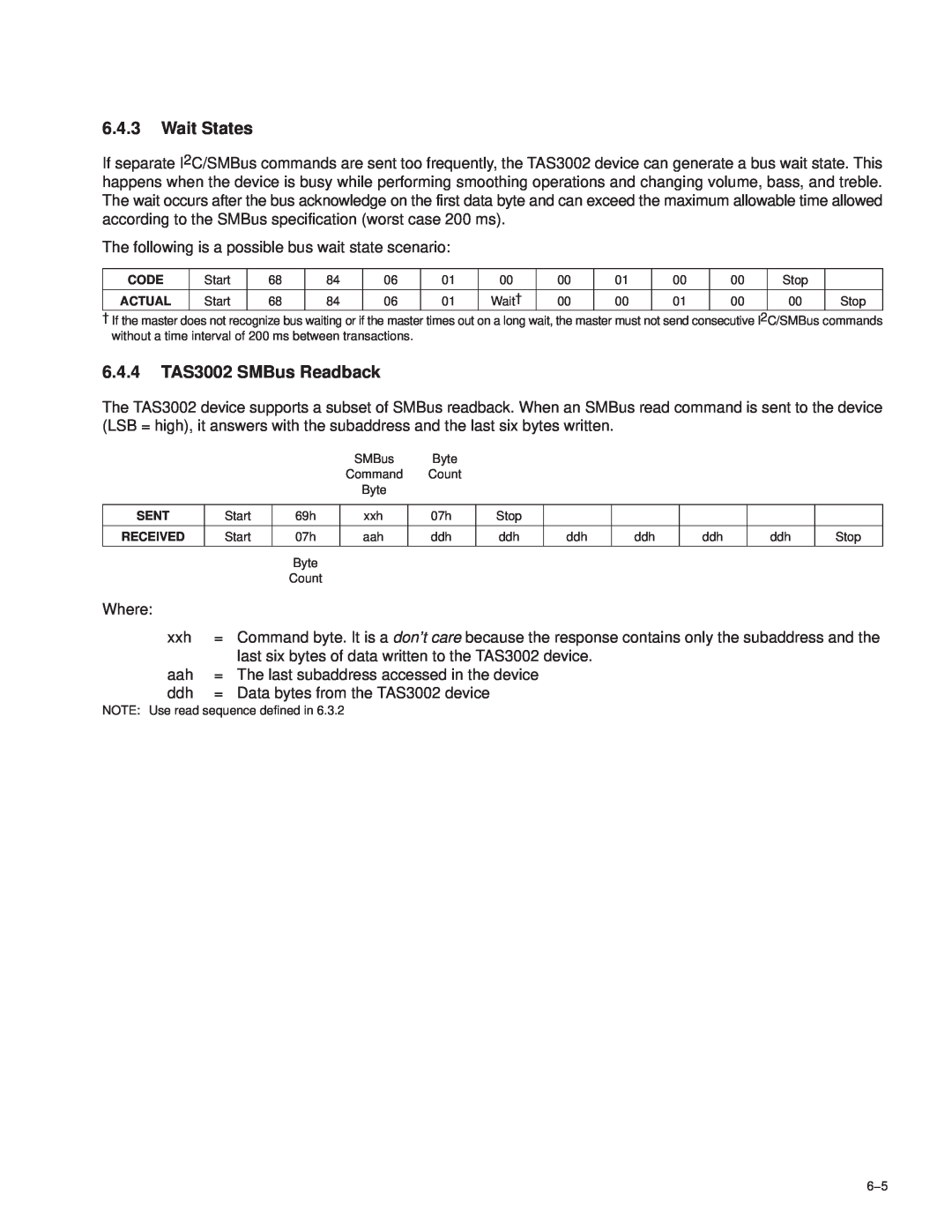
6.4.3Wait States, 6.4.4TAS3002 SMBus Readback
Models:
TAS3002
1
33
54
54
Download
54 pages
10.85 Kb
30
31
32
33
34
35
36
37
Specification
1.3Functional Block Diagram
7.2.2Reset
Soft Volume Update
Power-DownMode
1.2Features
Switching Characteristics
Page 33
Image 33
Page 32
Page 34
Page 33
Image 33
Page 32
Page 34
Contents
TAS3002
Data Manual
Digital Audio Processor With Codec
2001
IMPORTANT NOTICE
1.2Features
1 Introduction
1.1 Description
1.3Functional Block Diagram
Figure 1−1. TAS3002 Block Diagram
1.5 Terminal Functions
1.4 Terminal Assignments
Figure 1−2. TAS3002 Terminal Assignments
Table 1−1. TAS3002 Terminal Functions
Table 1−1. TAS3002 Terminal Functions Continued
Page
2 Audio Data Formats
2.1 Serial Interface Formats
Table 2−1. Serial Interface Options
2.2 Digital Output Modes
… … … …
… … … …
… … … …
Figure 2−2. I 2S Serial-InterfaceFormat
2.2.2I2S Serial-InterfaceFormat
… … … …
… … … …
… … … …
2.2.3MSB-Left-Justified, Serial-InterfaceFormat
… … … …
… … … …
PARAMETER
2.3 Switching Characteristics
UNIT
tcSCLK SCLK LRCLK tdSDOUT SDOUT1 SDOUT2 SDOUT0
Page
3.1 Analog Input
3 Analog Input/Output
3.2 Analog Output
3.2.1Direct Analog Output
3.2.2Analog Output With Gain
Figure 3−2. VCOM Decoupling Network
Figure 3−3. Analog Output With External Amplifier
3.2.3Reference Voltage Filter
TAS3002
Figure 3−4. TAS3002 Reference Voltage Filter
Page
4 Audio Control/Enhancement Functions
4.1 Soft Volume Update
4.2 Software Soft Mute
4.3 Input Mixer Control
4.4 Mono Mixer Control
4.5 Treble Control
Figure 4−1. TAS3002 Mixer Function
4.6 Bass Control
4.7 De-EmphasisMode DM
Figure 4−2. De-EmphasisMode Frequency Response
Table 4−1. Analog Control Register Description
4.8 Analog Control Register 40h
4.9.1Loudness Biquads
4.9 Dynamic Loudness Contour
4.9.2Loudness Gain
4.9.3Loudness Contour Operation
4.11 AllPass Function
4.10 Dynamic Range Compression/Expansion DRCE
4.13 Main Control Register 2 43h
4.12 Main Control Register 1 01h
Table 4−2. Main Control Register 1 Description
Table 4−3. Main Control Register 2 Description
Page
5 Filter Processor
Figure 5−1. Biquad Cascade Configuration
5.1 Biquad Block
5.1.1Filter Coefficients
Page
6.1 Introduction
6 I2C Serial Control Interface
6.2 I2C Protocol
Figure 6−1. Typical I 2C Data Transfer Sequence
6.3.1Write Cycle Example
6.3 Operation
Table 6−1. I 2C Protocol Definitions
Table 6−2. I 2C Address Byte Table
6.3.3I2C Wait States
6.3.2TAS3002 I2C Readback Example
6.4.1Block Write Protocol
6.4 SMBus Operation
6.4.2Write Byte Protocol
Table 6−3. I 2C Wait States
6.4.4TAS3002 SMBus Readback
6.4.3Wait States
Page
7.2.1Power-UpSequence
7.2 Power-Up/Power-DownReset
7.2.2Reset
7 Microcontroller Operation
Figure 7−1. TAS3002 Reset Circuit
7.2.3Reset Circuit
7.2.4Fast Load Mode
TAS3002
7.2.5Codec Reset
7.3 Power-DownMode
Figure 7−2. Power-DownTiming Sequence
7.3.1Power-DownTiming Sequence
7.4 Test Mode
7.5 Internal Interface
Table 7−1. GPI Terminal Programming
7.6.2GPI Architecture
Restore Volume and MCR
Figure 7−3. Internal Interface Flow Chart
Start Power Up Initialize Default EEPROM
Slave Write GPI Power Down
Table 7−2. 512-ByteEEPROM Memory Map 2.0 Channels
7.7 External EEPROM Memory Maps
BYTE NUMBER
ADDRESS
FUNCTION
TAS3002
NUMBER
TAS3002 ADDRESS
FUNCTION
CATEGORY
NUMBER
TAS3002 ADDRESS
FUNCTION
CATEGORY
8 Electrical Characteristics
Static Digital Specifications
8.2 Recommended Operating Conditions
8.4 ADC Digital Filter
Figure 8−1. ADC Digital Filter Characteristics
8.5 Analog-to-DigitalConverter
Figure 8−4. ADC High-PassFilter Characteristics
8.7 DAC Interpolation Filter
8.6 Input Multiplexer
8.9 DAC Output Performance Data
8.8 Digital-to-AnalogConverter
Figure 8−7. I 2C Bus Timing
8.10 I2C Serial Port Timing Characteristics
Figure 9−1. Stereo Application
9 System Diagrams
TAS3002
Clock
TAS3001
Figure 9−2. TAS3002 Device, 2.1 Channels
TAS3002
10 Mechanical Information
PFB S-PQFP-G48
PLASTIC QUAD FLATPACK
10−2
Top
Page
Image
Contents