2. Expanded Functions
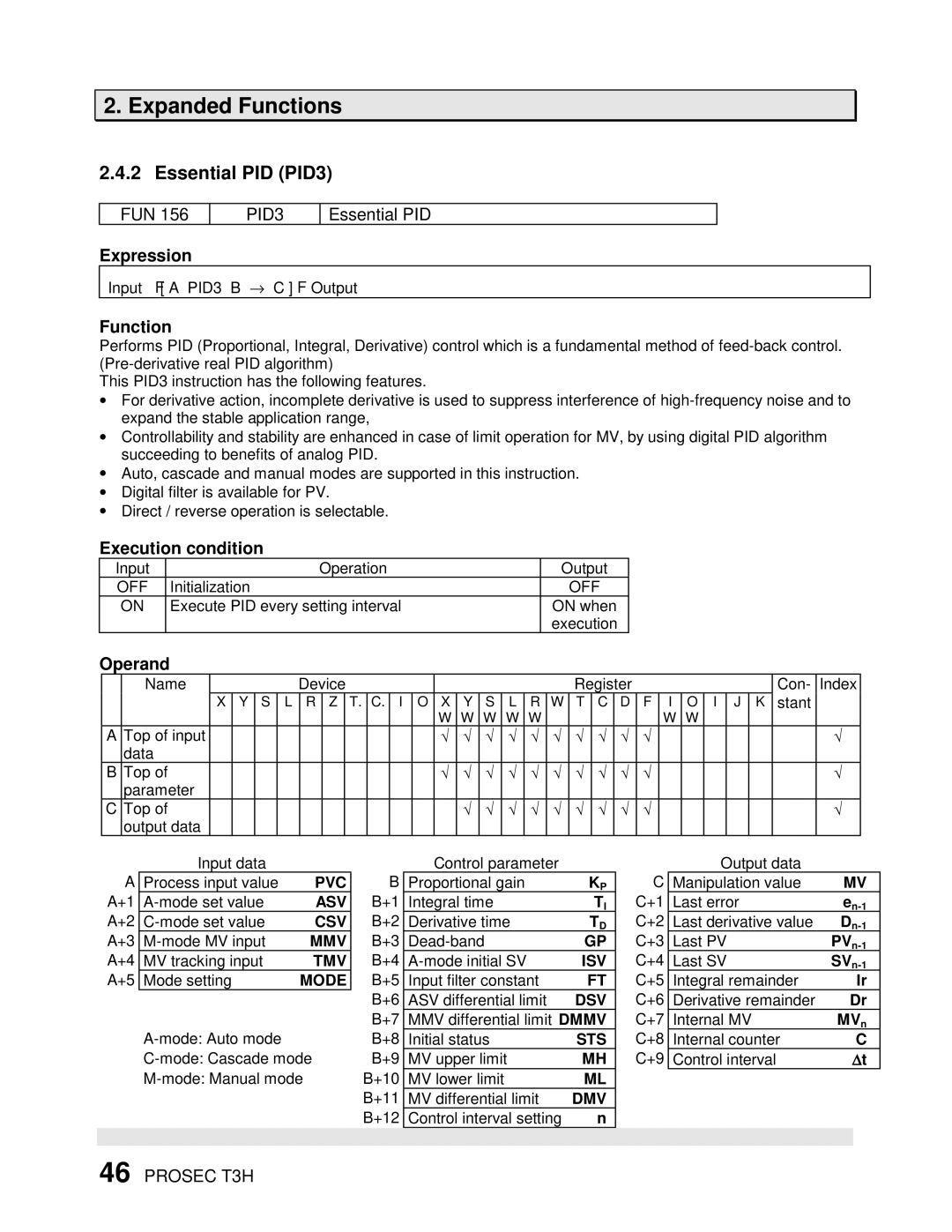
2.4.2 Essential PID (PID3)
FUN 156
PID3
Essential PID
Expression
Input ─[ A PID3 B → C ]─ Output
Function
Performs PID (Proportional, Integral, Derivative) control which is a fundamental method of
This PID3 instruction has the following features.
•For derivative action, incomplete derivative is used to suppress interference of
•Controllability and stability are enhanced in case of limit operation for MV, by using digital PID algorithm succeeding to benefits of analog PID.
•Auto, cascade and manual modes are supported in this instruction.
•Digital filter is available for PV.
•Direct / reverse operation is selectable.
Execution condition
Input | Operation | Output |
OFF | Initialization | OFF |
ON | Execute PID every setting interval | ON when |
|
| execution |
Operand
|
|
| Name |
|
|
|
| Device |
|
|
|
|
|
|
|
|
|
|
|
|
|
| Register |
|
|
|
|
|
|
| Con- | Index |
| ||||||
|
|
|
| X | Y | S | L | R | Z |
| T. | C. | I |
| O | X | Y |
| S |
| L |
| R | W | T |
| C | D | F |
| I | O | I | J | K | stant |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| W | W | W | W | W |
|
|
|
|
|
| W | W |
|
|
|
|
|
|
| ||||
| A | Top of input |
|
|
|
|
|
|
|
|
|
|
|
| √ | √ |
| √ |
| √ |
| √ | √ | √ |
| √ | √ | √ |
|
|
|
|
|
|
| √ |
| ||
|
| data |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
| B | Top of |
|
|
|
|
|
|
|
|
|
|
|
| √ | √ |
| √ |
| √ |
| √ | √ | √ |
| √ | √ | √ |
|
|
|
|
|
|
| √ |
| ||
|
| parameter |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
| C | Top of |
|
|
|
|
|
|
|
|
|
|
|
|
| √ |
| √ |
| √ |
| √ | √ | √ |
| √ | √ | √ |
|
|
|
|
|
|
| √ |
| ||
|
| output data |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
| A | Input data |
|
|
|
|
| B |
|
| Control parameter |
|
|
|
| C |
|
| Output data |
|
|
| ||||||||||||||||
|
| Process input value | PVC |
|
| Proportional gain |
|
|
| KP |
| Manipulation value | MV | ||||||||||||||||||||||||||
| A+1 | ASV |
| B+1 | Integral time |
|
|
|
|
|
| TI |
| C+1 | Last error | ||||||||||||||||||||||||
| A+2 | CSV |
| B+2 | Derivative time |
|
|
| TD |
| C+2 | Last derivative value | |||||||||||||||||||||||||||
| A+3 | MMV |
| B+3 |
|
|
|
|
|
| GP |
| C+3 | Last PV | |||||||||||||||||||||||||
| A+4 | MV tracking input | TMV |
| B+4 |
|
| ISV |
| C+4 | Last SV | ||||||||||||||||||||||||||||
| A+5 | Mode setting | MODE |
| B+5 | Input filter constant |
|
| FT |
| C+5 | Integral remainder |
| Ir | |||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
| B+6 | ASV differential limit |
| DSV |
| C+6 | Derivative remainder | Dr | ||||||||||||||||||||
|
|
|
|
|
|
| B+7 | MMV differential limit DMMV |
| C+7 | Internal MV | MVn | |||||||||||||||||||||||||||
|
|
|
|
|
|
| B+8 | Initial status |
|
|
|
| STS |
| C+8 | Internal counter |
| C | |||||||||||||||||||||
|
|
|
| B+9 | MV upper limit |
|
|
|
| MH |
| C+9 | Control interval | ∆ t | |||||||||||||||||||||||||
|
|
| B+10 | MV lower limit |
|
|
|
| ML |
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
| B+11 | MV differential limit |
| DMV |
|
|
|
|
|
|
|
|
|
|
|
| |||||||||||||
|
|
|
|
|
|
|
|
|
|
| B+12 | Control interval setting |
|
| n |
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|