2. Expanded Functions
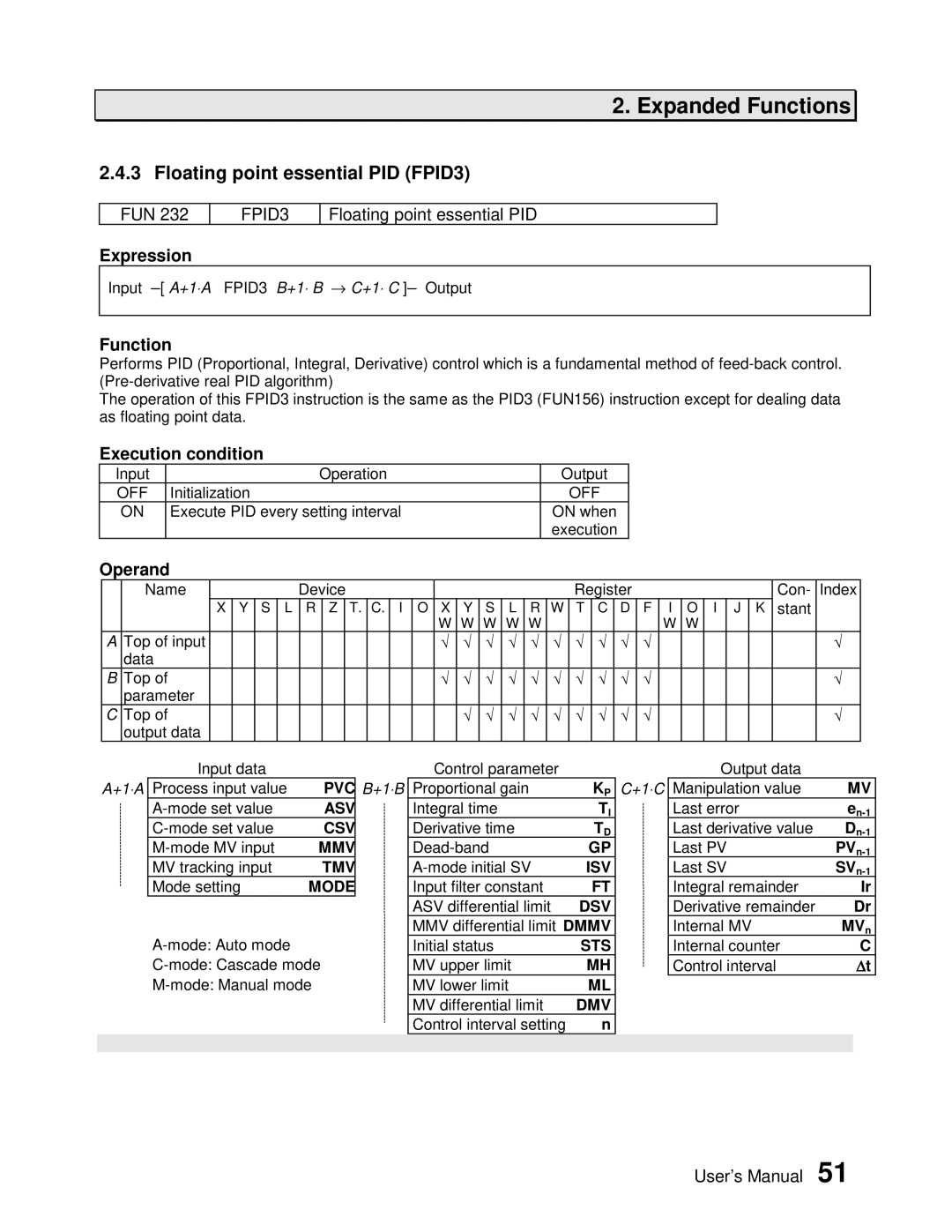
2.4.3 Floating point essential PID (FPID3)
FUN 232
FPID3
Floating point essential PID
Expression
Input ─[ A+1⋅A FPID3 B+1⋅ B → C+1⋅ C ]─ Output
Function
Performs PID (Proportional, Integral, Derivative) control which is a fundamental method of
The operation of this FPID3 instruction is the same as the PID3 (FUN156) instruction except for dealing data as floating point data.
Execution condition
Input | Operation | Output |
OFF | Initialization | OFF |
ON | Execute PID every setting interval | ON when |
|
| execution |
Operand
|
| Name |
|
|
|
| Device |
|
|
|
|
|
|
|
|
|
| Register |
|
|
|
|
|
|
| Con- | Index |
| |||||||||
|
|
|
| X | Y | S | L | R | Z | T. | C. | I | O | X | Y | S | L |
| R | W | T |
| C | D | F |
| I | O | I | J | K | stant |
|
|
| ||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| W | W | W | W | W |
|
|
|
|
|
| W | W |
|
|
|
|
|
|
| ||
| A | Top of input |
|
|
|
|
|
|
|
|
|
|
|
| √ | √ | √ | √ |
| √ | √ | √ |
| √ | √ | √ |
|
|
|
|
|
|
| √ |
| ||
|
| data |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
| B | Top of |
|
|
|
|
|
|
|
|
|
|
|
| √ | √ | √ | √ |
| √ | √ | √ |
| √ | √ | √ |
|
|
|
|
|
|
| √ |
| ||
|
| parameter |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
| C | Top of |
|
|
|
|
|
|
|
|
|
|
|
|
| √ | √ | √ |
| √ | √ | √ |
| √ | √ | √ |
|
|
|
|
|
|
| √ |
| ||
|
| output data |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
| Input data |
|
|
| B+1⋅B |
|
| Control parameter |
|
|
| C+1⋅C |
|
| Output data |
|
|
| |||||||||||||||||
| A+1⋅A | Process input value |
| PVC | Proportional gain |
|
|
|
| KP | Manipulation value | MV | |||||||||||||||||||||||||
|
|
|
| ASV |
|
|
| Integral time |
|
|
|
|
|
| TI |
|
|
| Last error | ||||||||||||||||||
|
|
|
| CSV |
|
|
| Derivative time |
|
|
|
| TD |
|
|
| Last derivative value | ||||||||||||||||||||
|
|
| MMV |
|
|
|
|
|
|
|
| GP |
|
|
| Last PV | |||||||||||||||||||||
|
|
| MV tracking input |
| TMV |
|
|
|
|
| ISV |
|
|
| Last SV | ||||||||||||||||||||||
|
|
| Mode setting | MODE |
|
|
| Input filter constant |
|
|
| FT |
|
|
| Integral remainder |
|
| Ir | ||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ASV differential limit | DSV |
|
|
| Derivative remainder |
| Dr | |||||||||||||||
|
|
|
|
|
|
|
|
|
| MMV differential limit DMMV |
|
|
| Internal MV | MVn | ||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
| Initial status |
|
|
|
| STS |
|
|
| Internal counter |
|
| C | |||||||||||||||
|
|
|
|
| MV upper limit |
|
|
| MH |
|
|
| Control interval |
| ∆ t | ||||||||||||||||||||||
|
|
|
|
| MV lower limit |
|
|
| ML |
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| MV differential limit |
| DMV |
|
|
|
|
|
|
|
|
|
|
|
| ||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Control interval setting |
|
| n |
|
|
|
|
|
|
|
|
|
|
|
| |||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
User’s Manual 51