Programming Manual
Page
FX Series Programmable Controllers
Foreword
FX Series Programmable Controllers
FAX Back Combined Programming Manual J
FX Series Programmable Controllers
Hardware Warnings
Software Warnings
FX Series Programmable Controllers
Contents
STL Programming
Applied Instructions
Rotation And Shift Functions 30 to
External FX Serial Devices Functions 80 to
Execution Times And Instructional
10-1
Viii
FX Series Programmable Controllers
Chapter Contents
Introduction
Overview
What is a Programmable Controller?
What do You Need to Program a PLC?
Special considerations for programming equipment
Current Generation CPU all versions
Assocciated Manuals
Manual name Number FX Base Unit Hardware
Manual name Number FX DU, GOT and DM units
Memo
Basic Program Instructions
FX Series Programmable ControllersBasic Program Instructions
What is a Program?
Outline of Basic Devices Used in Programming
Detailed device information
How to Read Ladder Logic
Example
Load, Load Inverse
OUT instruction
Program example
Timer and Counter Variations
Out
Use of dual coils
Last coil effect
Double Coil Designation
And, And Inverse
Peripheral limitations
Or, Or Inverse
ORI
Load Pulse, Load Trailing Pulse
Single Operation flags M2800 to M3071
Pulse, And Trailing Pulse
LDF ANF OUT
Or Pulse, Or Trailing Pulse
ORF ORB
Or Block
Batch processing limitations
Sequential processing limitations
Block
ANB
13 MPS, MRD and MPP
MPS, MRD and MPP usage
Multiple program examples
Master Control and Reset
MCR
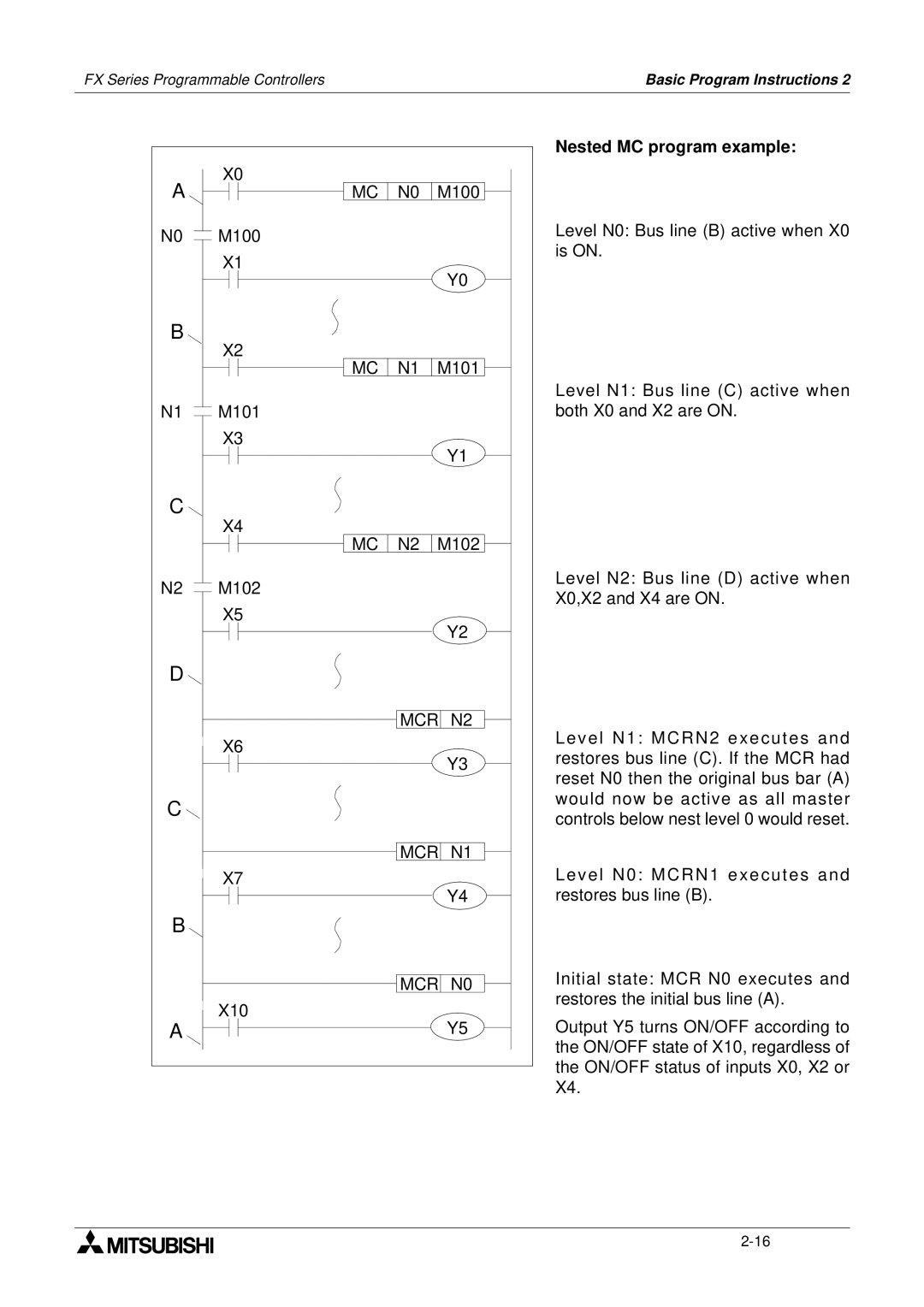
Nested MC program example
Set and Reset
Resetting timers and counters
Timer, Counter Out & Reset
Retentive timers
16.1Basic Timers, Retentive Timers And Counters
Normal 32 bit Counters
Bit counters
Availability of devices
High Speed Counters
PLF
Leading and Trailing Pulse
Inverse
Usages for INV
No Operation
No Operation
20 End
Program scan
Memo
STL Programming
FX Series Programmable ControllersSTL Programming
What is STL, SFC And IEC1131 Part 3?
General note
How STL Operates
Each step is a program
Look Inside an STL
Embedded STL programs
How To Start And End An STL Program
Combined SFC Ladder representation
Activating new states
Initial Steps
Terminating an STL Program
Returning to Standard Ladder
Using SET to drive an STL coil
Moving Between STL Steps
Using OUT to drive an STL coil
OUT is used for loops and jumps
Out is used for distant jumps
Rules and Techniques For STL programs
Basic Notes On The Behavior Of STL programs
T001 K20 K50
Single Signal Step Control
Method 1 Using locking devices
Method 2 Special Single Pulse Flags
Restrictions Of Some Instructions When Used With STL
Using ‘jump’ operations with STL
Restrictions on using applied instructions
Using STL To Select The Most Appropriate Program
STL OUT SET
Using STL To Activate Multiple Flows Simultaneously
Limits on the number of branches
Limits on the number of branches
General Rules For Successful STL Branching
Instruction Format
General Precautions When Using The FX-PCS/AT-EE Software
Programming Examples
Simple STL Flow
Identification of normally closed contacts
SET STL
Points to note
Selective Branch/ First State Merge Example Program
Full STL flow diagram/program
Advanced STL Use
Devices in Detail
FX Series Programmable ControllersDevices in Detail
Available devices
Configuration details
Inputs
Device Mnemonic
Outputs
Device Mnemonic Y
Alias O/P
Auxiliary Relays
Device Mnemonic M
General Stable State Auxiliary Relays
Battery Backed/ Latched Auxiliary Relays
External loads
Special Diagnostic Auxiliary Relays
Special Single Operation Pulse Relays
State Relays
Device Mnemonic S
General Stable State State Relays
Battery Backed/ Latched State Relays
PLC FX 1S FX 1N FX 2N
STL/SFC programming
Assigned states
Monitoring STL programs
IST instruction
Annunciator Flags
Device availability
Pointers
Jumping to the end of the program
Device Mnemonic P
Nested levels
Interrupt Pointers
Additional applied instructions
Pointer position
Timer Interrupts
Rules of use
Input Interrupts
Additional notes
Driving special auxiliary relays
Disabling high speed counter interrupts
Disabling Individual Interrupts
Device Mnemonic K
Constant K
Constant H
Example device usage N/A
Timers
Timer accuracy
Device Mnemonic T
General timer operation
Selectable Timers
Driving special auxiliary coils
Using timers in interrupt or ‘CALL’ subroutines
Retentive Timers
Timer Accuracy
Internal timer accuracy
Timers Used in Interrupt and ‘CALL’ Subroutines
Condition
High speed counters
Setting ranges for counters
Counters
Device Mnemonic C
Battery backed/latched counters
General/ Latched 16bit UP Counters
Battery backed/ latched counters
Selecting the counting direction
General/ Latched 32bit Bi-directional Counters
Basic high speed counter operation
Further uses None
Driving high speed counter coils
Basic High Speed Counter Operation
Input assignment
Counter Speeds
Availability of High Speed Counters
Calculating the maximum combined counting speed on FX1S
Direction setting
Device specification
Setting range
Using the SPD instruction
RST
11.5 2 Phase Bi-directional Counters C246 to C250
Device size
11.6 A/B Phase Counters C252 to C255
Data Registers
Device Mnemonic D
Example device usage None
Data register updates
Data retention
General Use Registers
Battery Backed/ Latched Registers
Using the FX2-40AW/AP
Use of diagnostic registers
Special Diagnostic Registers
File Registers
Special caution when using FX1S
Writing to file registers
Program memory registers
Externally Adjusted Registers
Uses
Device Mnemonic V,Z
Index Registers
Use of Modifiers with Applied Instruction Parameters
Available forms
Using Multiple Index Registers
Modifying a Constant
Misuse of the Modifiers
Bits, Words, BCD and Hexadecimal
Bit Devices, Individual and Grouped
Moving grouped bit devices
Assigning I/O
Assigning grouped bit devices
Word Devices
Interpreting Word Data
FX Series Programmable Controllers
Binary Coded Decimal value= Error
Word Data Summary
14.4 Two’s Compliment
Inverted7 Additional1
Floating Point And Scientific Notation
Some useful constants
Scientific Notation
Floating Point Format
FLT