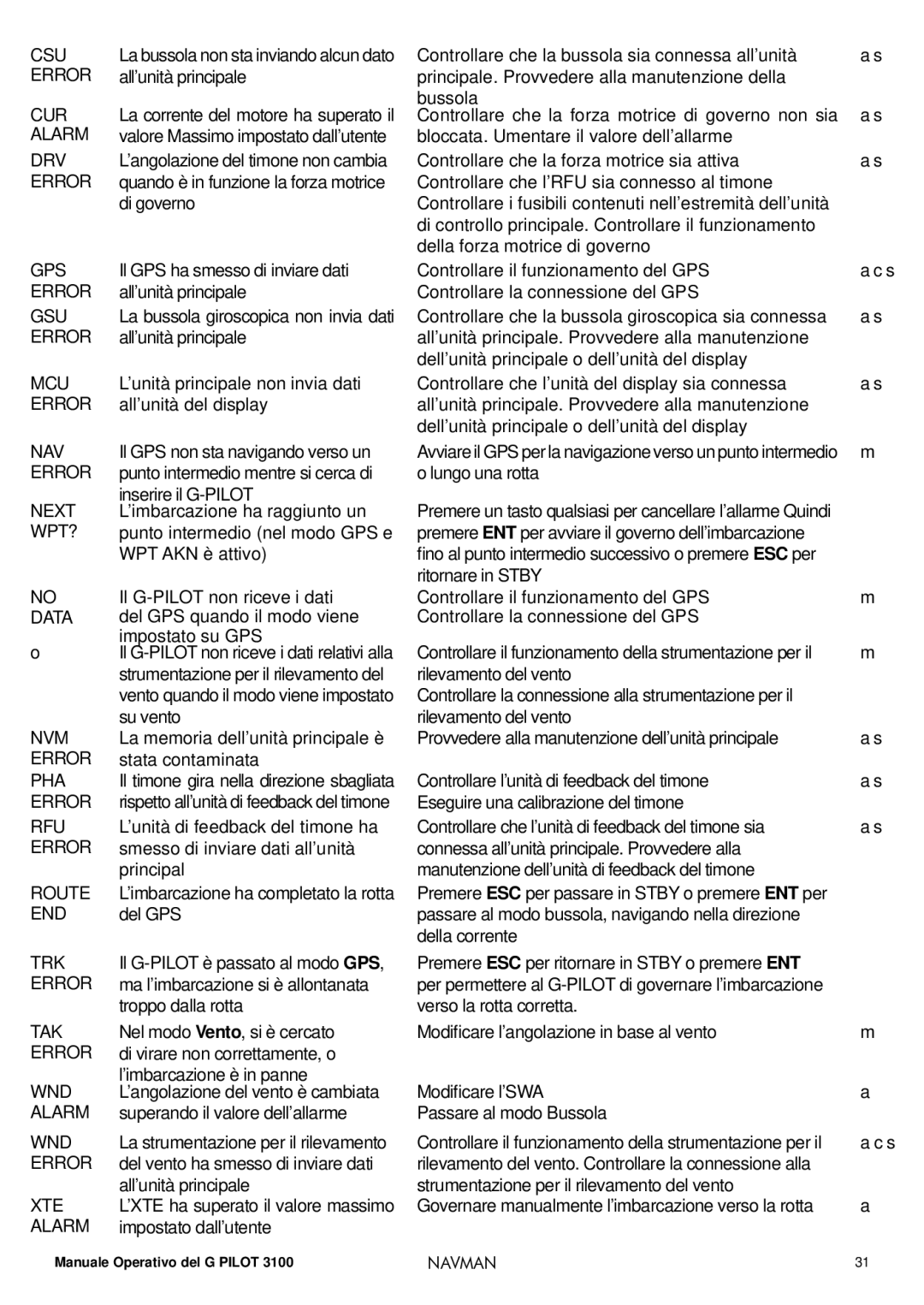
CSU | La bussola non sta inviando alcun dato |
ERROR | all’unità principale |
CUR | La corrente del motore ha superato il |
ALARM | valore Massimo impostato dall’utente |
DRV | L’angolazione del timone non cambia |
ERROR | quando è in funzione la forza motrice |
| di governo |
GPS | Il GPS ha smesso di inviare dati |
ERROR | all’unità principale |
GSU | La bussola giroscopica non invia dati |
ERROR | all’unità principale |
MCU | L’unità principale non invia dati |
ERROR | all’unità del display |
NAV | Il GPS non sta navigando verso un |
ERROR | punto intermedio mentre si cerca di |
NEXT | inserire il |
L’imbarcazione ha raggiunto un | |
WPT? | punto intermedio (nel modo GPS e |
| WPT AKN è attivo) |
NO | Il |
DATA | del GPS quando il modo viene |
| impostato su GPS |
oIl
| su vento |
NVM | La memoria dell’unità principale è |
ERROR | stata contaminata |
PHA | Il timone gira nella direzione sbagliata |
ERROR | rispetto all’unità di feedback del timone |
RFU | L’unità di feedback del timone ha |
ERROR | smesso di inviare dati all’unità |
| principal |
ROUTE | L’imbarcazione ha completato la rotta |
END | del GPS |
TRK | Il |
ERROR | ma l’imbarcazione si è allontanata |
| troppo dalla rotta |
TAK | Nel modo Vento, si è cercato |
ERROR | di virare non correttamente, o |
WND | l’imbarcazione è in panne |
L’angolazione del vento è cambiata | |
ALARM | superando il valore dell’allarme |
WND | La strumentazione per il rilevamento |
ERROR | del vento ha smesso di inviare dati |
| all’unità principale |
XTE | L’XTE ha superato il valore massimo |
ALARM | impostato dall’utente |
Controllare che la bussola sia connessa all’unità | a s |
principale. Provvedere alla manutenzione della |
|
bussola | a s |
Controllare che la forza motrice di governo non sia | |
bloccata. Umentare il valore dell’allarme |
|
Controllare che la forza motrice sia attiva | a s |
Controllare che l’RFU sia connesso al timone |
|
Controllare i fusibili contenuti nell’estremità dell’unità |
|
di controllo principale. Controllare il funzionamento |
|
della forza motrice di governo |
|
Controllare il funzionamento del GPS | a c s |
Controllare la connessione del GPS |
|
Controllare che la bussola giroscopica sia connessa | a s |
all’unità principale. Provvedere alla manutenzione |
|
dell’unità principale o dell’unità del display |
|
Controllare che l’unità del display sia connessa | a s |
all’unità principale. Provvedere alla manutenzione |
|
dell’unità principale o dell’unità del display |
|
Avviare il GPS per la navigazione verso un punto intermedio | m |
o lungo una rotta |
|
Premere un tasto qualsiasi per cancellare l’allarme Quindi |
|
premere ENT per avviare il governo dell’imbarcazione |
|
fino al punto intermedio successivo o premere ESC per |
|
ritornare in STBY |
|
Controllare il funzionamento del GPS | m |
Controllare la connessione del GPS |
|
Controllare il funzionamento della strumentazione per il | m |
rilevamento del vento |
|
Controllare la connessione alla strumentazione per il |
|
rilevamento del vento |
|
Provvedere alla manutenzione dell’unità principale | a s |
Controllare l’unità di feedback del timone | a s |
Eseguire una calibrazione del timone |
|
Controllare che l’unità di feedback del timone sia | a s |
connessa all’unità principale. Provvedere alla |
|
manutenzione dell’unità di feedback del timone |
|
Premere ESC per passare in STBY o premere ENT per |
|
passare al modo bussola, navigando nella direzione |
|
della corrente |
|
Premere ESC per ritornare in STBY o premere ENT |
|
per permettere al |
|
verso la rotta corretta. |
|
Modificare l’angolazione in base al vento | m |
Modificare l’SWA | a |
Passare al modo Bussola |
|
Controllare il funzionamento della strumentazione per il | a c s |
rilevamento del vento. Controllare la connessione alla |
|
strumentazione per il rilevamento del vento |
|
Governare manualmente l’imbarcazione verso la rotta | a |
Manuale Operativo del G PILOT 3100 | NAVMAN | 31 |