Chapter 4 |
|
|
|
|
|
|
| ||||||
|
|
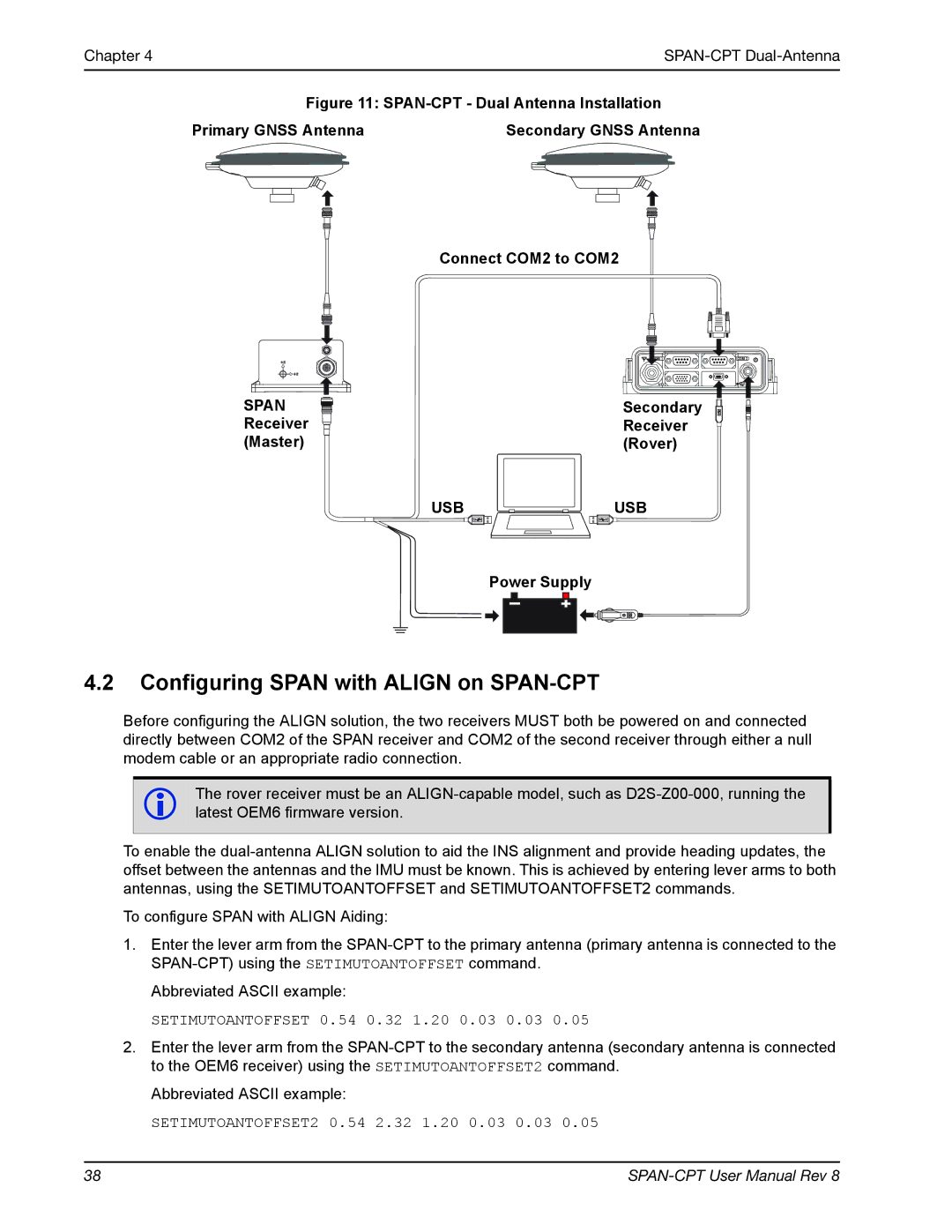
| Figure 11: | ||||||||||
Primary GNSS Antenna | Secondary GNSS Antenna | ||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Connect COM2 to COM2
COM 1![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
I/O ![]()
COM 2
SPAN | Secondary |
Receiver | Receiver |
(Master) | (Rover) |
USB | USB |
| Power Supply |
4.2Configuring SPAN with ALIGN on SPAN-CPT
Before configuring the ALIGN solution, the two receivers MUST both be powered on and connected directly between COM2 of the SPAN receiver and COM2 of the second receiver through either a null modem cable or an appropriate radio connection.
The rover receiver must be an
To enable the
To configure SPAN with ALIGN Aiding:
1.Enter the lever arm from the
Abbreviated ASCII example:
SETIMUTOANTOFFSET 0.54 0.32 1.20 0.03 0.03 0.05
2.Enter the lever arm from the
Abbreviated ASCII example:
SETIMUTOANTOFFSET2 0.54 2.32 1.20 0.03 0.03 0.05
38 |