Altivar
Variable-torque applications
Table of contents
Migration from ATV 38V ATV
Altivar 38 hardware identification
ATV38 catalog Power Number
Choosing the Altivar 61 catalog number
Your catalog number starts with ATV38H
Your catalog number starts with ATV38ED
Selecting the power circuit options
Mounting accessories
Removable power terminal kit VW3A5881x
Air exchanger kit VW3A5880x
Nema type 1 mounting kit
Separate control card power supply kit VW3A5860x
Control circuit options
Control card fan kit VW3A5882x
Remote display terminal VW3A58103
Selecting I/O extension cards VW3A58201, VW3A58202
ATV38 and I/O option cards VW3A58201, VW3A58202
ATV38
PTC
PI feedback or summed reference Three different options
Becomes ATV
VW3A58202
VW3... card
Selecting communication channels
Communication via Modbus network
Communication with Profibus bus VW3A58307
Communication with DeviceNet bus VW3A58309
Communication with Metasys N2 bus VW3A58354U
Communication with Interbus bus VW3A58304E
Communication via Ethernet network VW3A58310
Communication via Fipio bus VW3A58311
Installation
Using catalog numbers starting with ATV38H
Comparison of dimensions Width Height Depth
ATV 61H075N4
ATV 61HU15N4
ATV 61HU22N4
ATV 61HD45N4
ATV 61HD55N4
ATV 61HD75N4
ATV 61HD90N4
Comparison of dimensions
Dimensions
ATV38Hppp product on heatsink
ATV 61H
D15N4, D18N4
D22N4
D30N4, D37N4
D45N4, D55N4, D75N4
ATV 38Hppp 75 kW and y 315 kW Product on heatsink
ATV61H
Mounting the RFI filter
Drive Filter Width Height Depth Mounting
Drive
Width Height Depth Mounting
Comparison of dimensions
RFI filters
VW3
Mounting under the drive
Side mounting against the ATV
Nema mounting kits
Kit catalog
ATV38Hppppp
Kit catalog Product
Kit for UL Nema Type 1 conformity or IP 21 protection
Separate control card power supply
Remote display terminal
Power cables
Disconnecting the RFI filter if using an IT system
Layout of the ATV38 power terminals
Connecting to the Altivar
Characteristics of the ATV38 power terminals
AWG
Maximum terminal wire size/tightening torque
Drive terminals L1/R, L2/S, L3/T, U/T1, V/T2, W/T3
PC/-, PO, PA/+
PA, PB
ATV61H D90M3X, C13N4
PA, PB RO, SO, to
ATV61HC16N4
ATV61HC22N4
ATV61H C25N4, C31N4
Control wiring and I/O characteristics
Control and option card logic input wiring
ATV38 value kOhms
LI6 wired as PTC probe
Encoder
Installing the communication option card
General
Acceptance
Check that the drive is turned off
Option card fault
Value Description of parameter values
Mixed schematic
Schematic diagram
Communication via Modbus network
Calculating the polarization resistors
Configuring the drive
Configuring the address
Configuring the drive control mode
Reminder of the various connection methods
Configuring communication monitoring
PLC configuration and application
Address ATV38 switches ATV61 switches 12345678
Reminder of possible connection methods
Configuring polarity on the drive RS 485 bus
PLC configuration and application
Communication via CANopen network
Matching the line termination resistor
Configuring the drive
Address and Baud rate
Configuring the drive address on the Profibus DP network
Communication via Profibus DP network
Address
1234
Configuring the drive in ATV38 Interchangeability mode
Communication fault
Connecting to the Fipio bus
Configuring the drive address on the Fipio network
Communication via Fipio network VW3 A3 311 option card
Presentation
Altivar 38 PKW indexed periodic variables
Managing loss of Fipio communication
Family
Base module
Configuring the communication parameters
Communication via Interbus network
Configuring the drive address on the Modbus Plus network
Communication via Modbus Plus network
ATV38 ATV61
Communication fault
Configuring the drive on the network
Configuring the drive address on the DeviceNet network
Communication via DeviceNet network
MAC
PLC configuration and application
Drive implementation on the DeviceNet network
Implementation of the communication option cards
Implementation of the communication option cards
Implementation of the communication option cards
Implementation of the communication option cards
P06 P06
Communication fault
Drive configuration in Expert mode
Using the Bootp protocol
Communication via Ethernet network
Transmission speed
Using the DHCP-FDR protocol
Faulty Device Replacement FDR
Activating the service
Procedure on the Altivar
Modbus service
Programming the Altivar 38 Ethernet parameters
Available address fields
Xxxx
IO Scanning service
Ethernet card access to the Modbus server
Configuring the periodic parameter assignment table
Modbus functions available
FDR service fault EPF2
Configuring the IO Scanner page from the Http server
Implementation of the communication option cards
Configuring the IO Scanner page using TCP/Modbus messaging
Altivar 38 PKW parameter-setting service
Snmp agent
Description ATV61 register
PDA Altivar page Last Fault = ILF Fault
Communication fault
FDR service fault EPF2
Standard Http server
AS-i
11 . +/- speed mode
Assignment of the Inputs/Outputs
Speed mode, 1 direction of operation
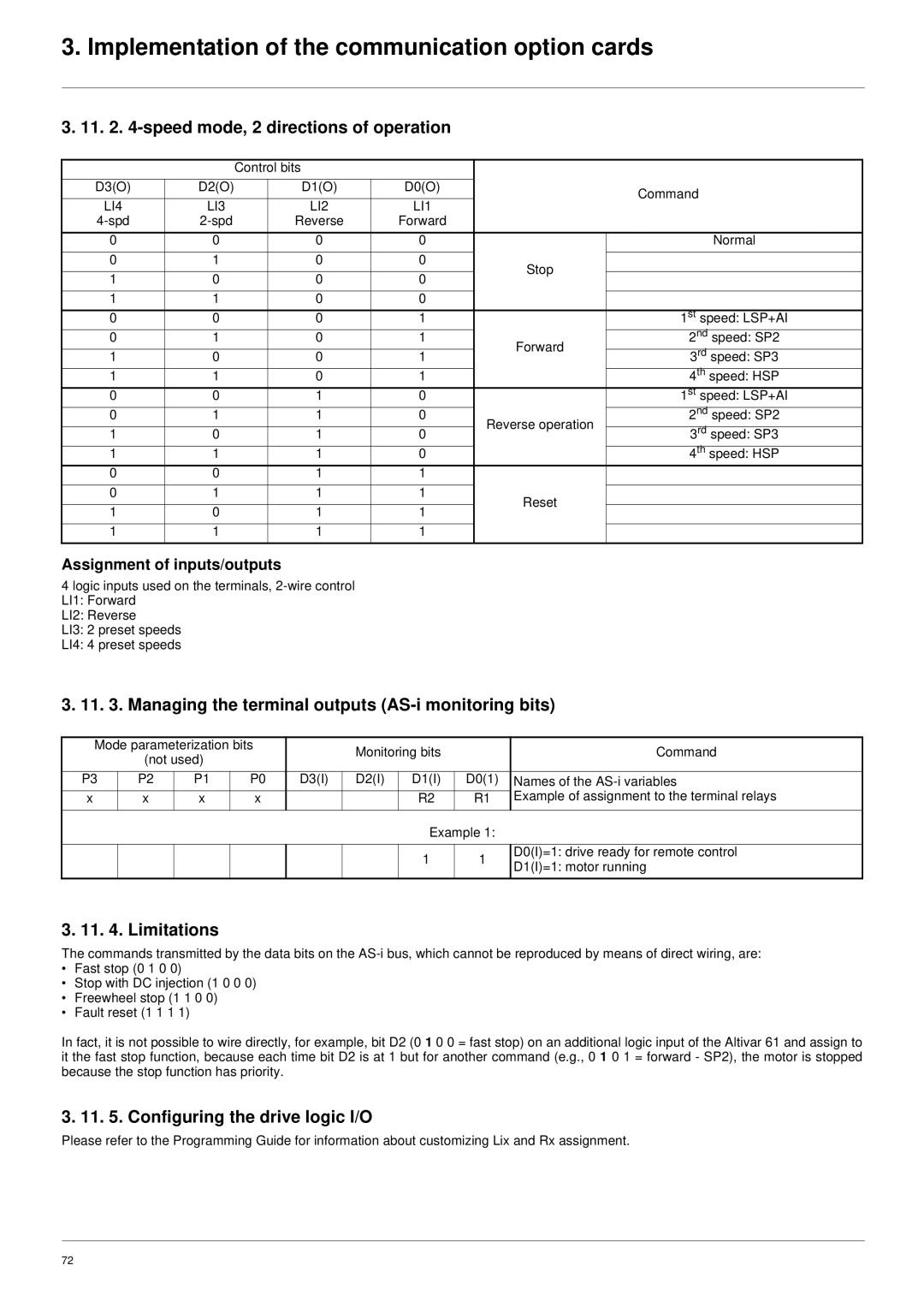
Assignment of inputs/outputs
Configuring the drive logic I/O
Speed mode, 2 directions of operation
Managing the terminal outputs AS-i monitoring bits
Limitations
Application-specific option cards
Pump card
Multi-motor card
Multi-parameter card
Atv61migrationenv1 2006-04