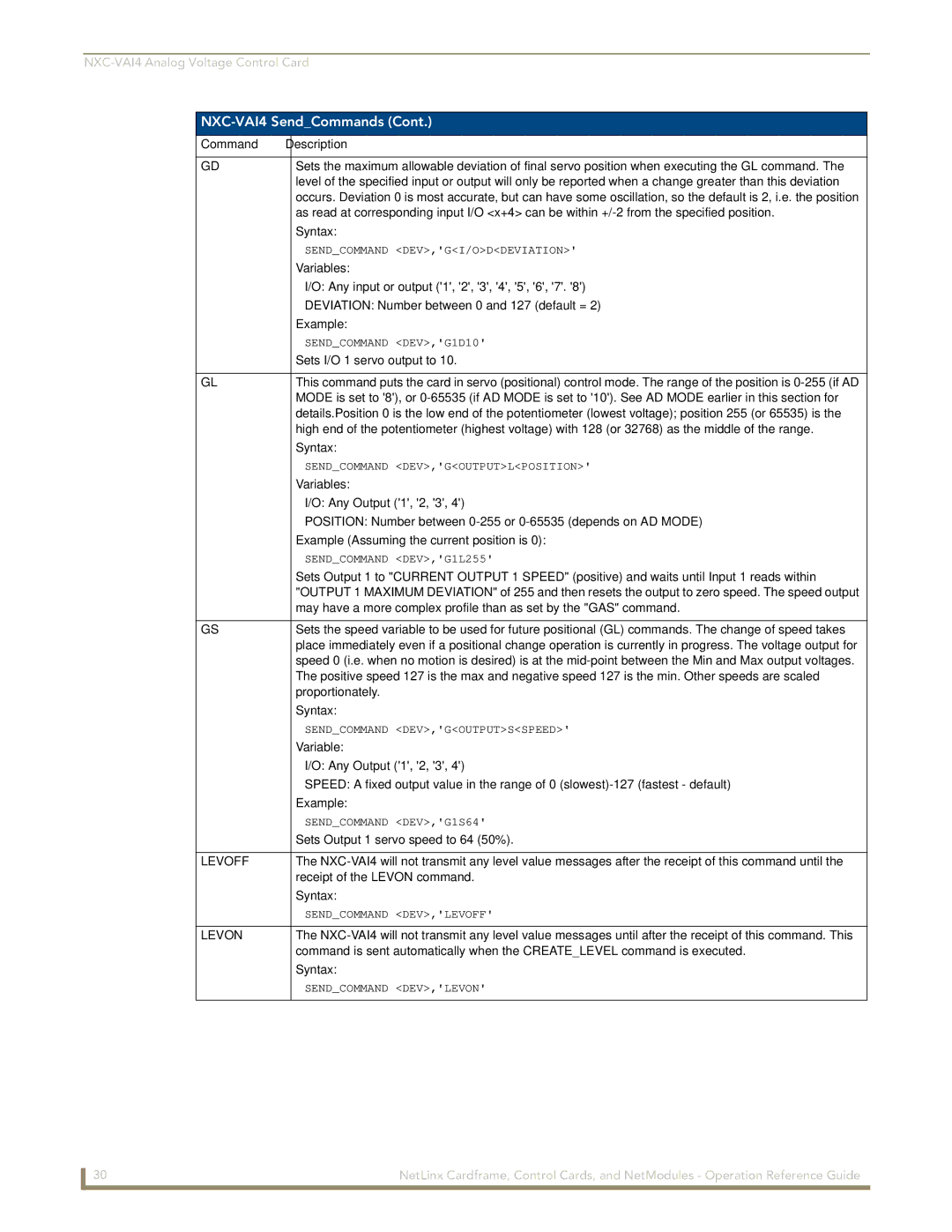
NXC-VAI4 Send_Commands (Cont.)
Command | Description |
|
|
GD | Sets the maximum allowable deviation of final servo position when executing the GL command. The |
| level of the specified input or output will only be reported when a change greater than this deviation |
| occurs. Deviation 0 is most accurate, but can have some oscillation, so the default is 2, i.e. the position |
| as read at corresponding input I/O <x+4> can be within |
| Syntax: |
| SEND_COMMAND <DEV>,'G<I/O>D<DEVIATION>' |
| Variables: |
| I/O: Any input or output ('1', '2', '3', '4', '5', '6', '7'. '8') |
| DEVIATION: Number between 0 and 127 (default = 2) |
| Example: |
| SEND_COMMAND <DEV>,'G1D10' |
| Sets I/O 1 servo output to 10. |
|
|
GL | This command puts the card in servo (positional) control mode. The range of the position is |
| MODE is set to '8'), or |
| details.Position 0 is the low end of the potentiometer (lowest voltage); position 255 (or 65535) is the |
| high end of the potentiometer (highest voltage) with 128 (or 32768) as the middle of the range. |
| Syntax: |
| SEND_COMMAND <DEV>,'G<OUTPUT>L<POSITION>' |
| Variables: |
| I/O: Any Output ('1', '2, '3', 4') |
| POSITION: Number between |
| Example (Assuming the current position is 0): |
| SEND_COMMAND <DEV>,'G1L255' |
| Sets Output 1 to "CURRENT OUTPUT 1 SPEED" (positive) and waits until Input 1 reads within |
| "OUTPUT 1 MAXIMUM DEVIATION" of 255 and then resets the output to zero speed. The speed output |
| may have a more complex profile than as set by the "GAS" command. |
|
|
GS | Sets the speed variable to be used for future positional (GL) commands. The change of speed takes |
| place immediately even if a positional change operation is currently in progress. The voltage output for |
| speed 0 (i.e. when no motion is desired) is at the |
| The positive speed 127 is the max and negative speed 127 is the min. Other speeds are scaled |
| proportionately. |
| Syntax: |
| SEND_COMMAND <DEV>,'G<OUTPUT>S<SPEED>' |
| Variable: |
| I/O: Any Output ('1', '2, '3', 4') |
| SPEED: A fixed output value in the range of 0 |
| Example: |
| SEND_COMMAND <DEV>,'G1S64' |
| Sets Output 1 servo speed to 64 (50%). |
|
|
LEVOFF | The |
| receipt of the LEVON command. |
| Syntax: |
| SEND_COMMAND <DEV>,'LEVOFF' |
LEVON | The |
| command is sent automatically when the CREATE_LEVEL command is executed. |
| Syntax: |
| SEND_COMMAND <DEV>,'LEVON' |
30 | NetLinx Cardframe, Control Cards, and NetModules - Operation Reference Guide |