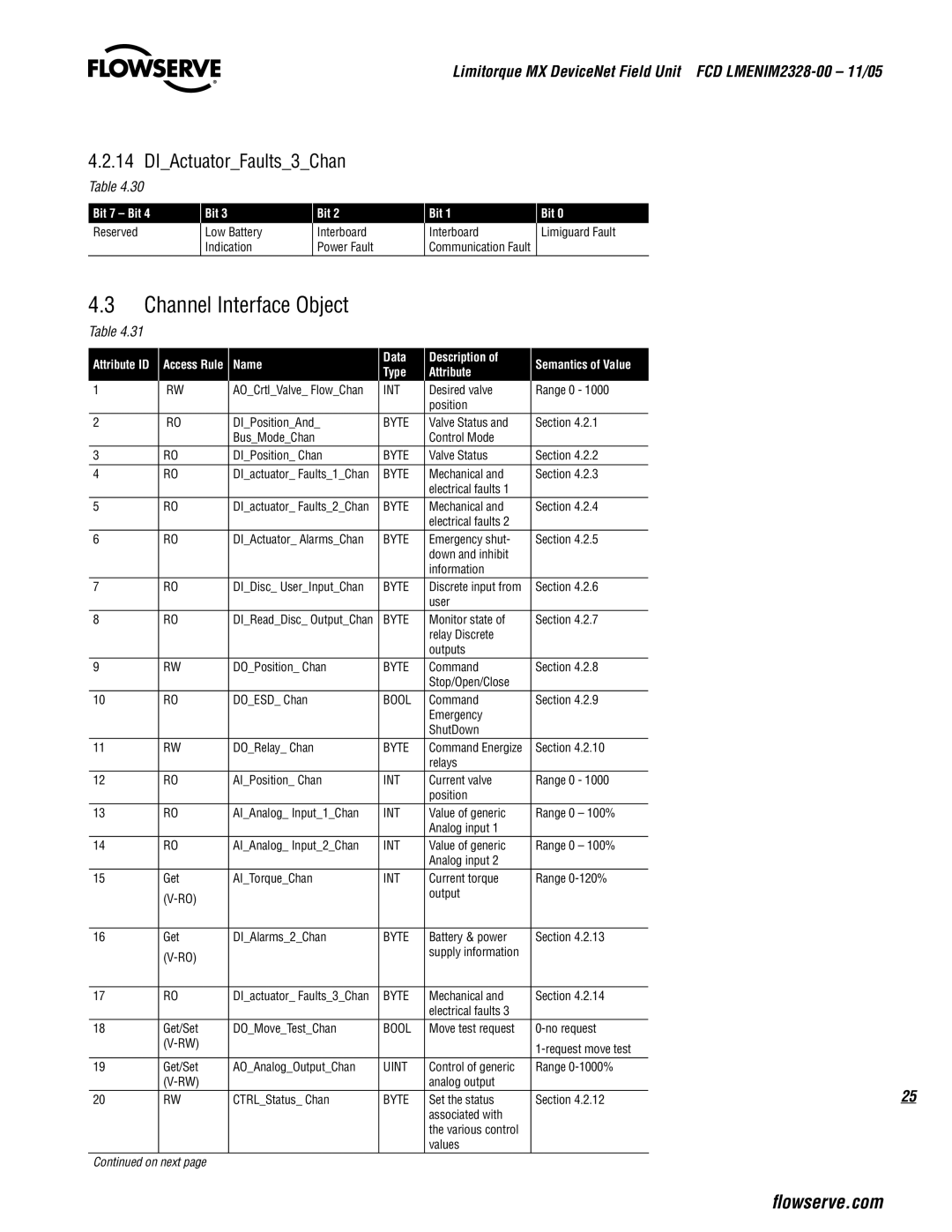
4.2.14 DI_Actuator_Faults_3_Chan
Table 4.30
Bit 7 – Bit 4 |
| Bit 3 |
| Bit 2 |
Reserved |
| Low Battery |
| Interboard |
|
| |||
|
| Indication |
| Power Fault |
|
|
|
|
|
Limitorque MX DeviceNet Field Unit FCD
Bit 1 |
| Bit 0 |
Interboard |
| Limiguard Fault |
| ||
Communication Fault |
|
|
|
|
|
4.3Channel Interface Object
Table 4.31
Attribute ID | Access Rule | Name | Data | Description of | Semantics of Value | |
Type | Attribute | |||||
|
|
|
| |||
1 | RW | AO_Crtl_Valve_ Flow_Chan | INT | Desired valve | Range 0 - 1000 | |
|
|
|
| position |
| |
2 | RO | DI_Position_And_ | BYTE | Valve Status and | Section 4.2.1 | |
|
| Bus_Mode_Chan |
| Control Mode |
| |
3 | RO | DI_Position_ Chan | BYTE | Valve Status | Section 4.2.2 | |
|
|
|
|
|
| |
4 | RO | DI_actuator_ Faults_1_Chan | BYTE | Mechanical and | Section 4.2.3 | |
|
|
|
| electrical faults 1 |
| |
5 | RO | DI_actuator_ Faults_2_Chan | BYTE | Mechanical and | Section 4.2.4 | |
|
|
|
| electrical faults 2 |
| |
6 | RO | DI_Actuator_ Alarms_Chan | BYTE | Emergency shut- | Section 4.2.5 | |
|
|
|
| down and inhibit |
| |
|
|
|
| information |
| |
7 | RO | DI_Disc_ User_Input_Chan | BYTE | Discrete input from | Section 4.2.6 | |
|
|
|
| user |
| |
8 | RO | DI_Read_Disc_ Output_Chan | BYTE | Monitor state of | Section 4.2.7 | |
|
|
|
| relay Discrete |
| |
|
|
|
| outputs |
| |
9 | RW | DO_Position_ Chan | BYTE | Command | Section 4.2.8 | |
|
|
|
| Stop/Open/Close |
| |
10 | RO | DO_ESD_ Chan | BOOL | Command | Section 4.2.9 | |
|
|
|
| Emergency |
| |
|
|
|
| ShutDown |
| |
11 | RW | DO_Relay_ Chan | BYTE | Command Energize | Section 4.2.10 | |
|
|
|
| relays |
| |
12 | RO | AI_Position_ Chan | INT | Current valve | Range 0 - 1000 | |
|
|
|
| position |
| |
13 | RO | AI_Analog_ Input_1_Chan | INT | Value of generic | Range 0 – 100% | |
|
|
|
| Analog input 1 |
| |
14 | RO | AI_Analog_ Input_2_Chan | INT | Value of generic | Range 0 – 100% | |
|
|
|
| Analog input 2 |
| |
15 | Get | AI_Torque_Chan | INT | Current torque | Range | |
|
|
| output |
| ||
|
|
|
|
| ||
|
|
|
|
|
| |
16 | Get | DI_Alarms_2_Chan | BYTE | Battery & power | Section 4.2.13 | |
|
|
| supply information |
| ||
|
|
|
|
| ||
|
|
|
|
|
| |
17 | RO | DI_actuator_ Faults_3_Chan | BYTE | Mechanical and | Section 4.2.14 | |
|
|
|
| electrical faults 3 |
| |
18 | Get/Set | DO_Move_Test_Chan | BOOL | Move test request | ||
|
|
|
| |||
|
|
|
|
| ||
19 | Get/Set | AO_Analog_Output_Chan | UINT | Control of generic | Range | |
|
|
| analog output |
| ||
20 | RW | CTRL_Status_ Chan | BYTE | Set the status | Section 4.2.12 | |
|
|
|
| associated with |
| |
|
|
|
| the various control |
| |
|
|
|
| values |
| |
Continued on next page |
|
|
|
| ||
25
flowserve.com