Parameter Setting
Parameters for Function Selection
|
|
|
| Default setting is shown by [ ] | ||
Parameter | Parameter Name | Setting | Function/Description | |||
No. | range | |||||
|
|
|
| |||
00 | Axis address | 0 – 15 | In communications with a host device such as a personal computer that uses | |||
|
|
| [1] | RS232C/485 with multiple axes, you should identify to which axis the host accesses | ||
|
|
|
| and use this parameter to confirm axis address in terms of numerals. | ||
|
|
|
|
|
| |
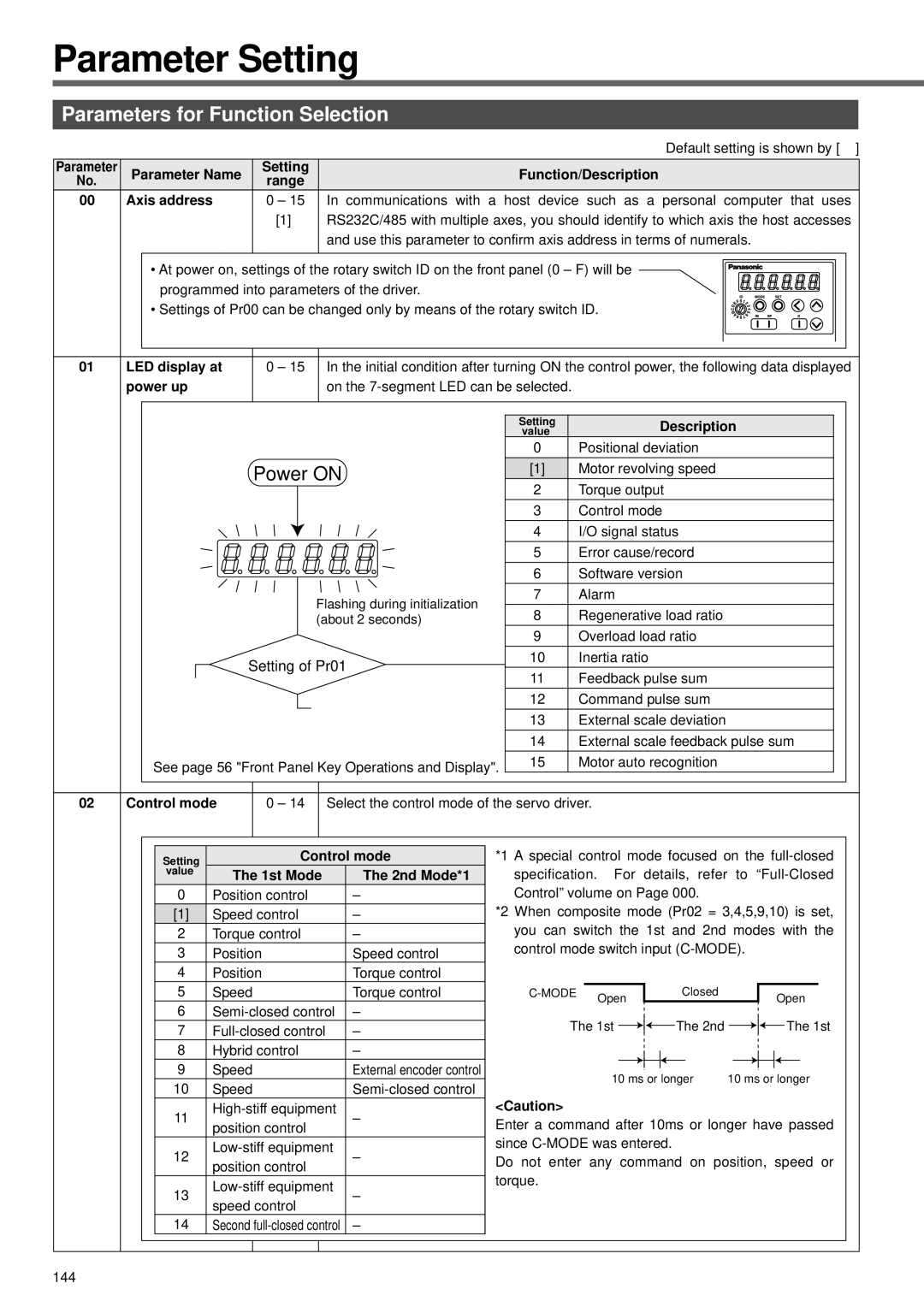
• At power on, settings of the rotary switch ID on the front panel (0 – F) will be programmed into parameters of the driver.
• Settings of Pr00 can be changed only by means of the rotary switch ID.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
01 | LED display at |
| 0 – 15 |
| In the initial condition after turning ON the control power, the following data displayed | ||||||||||||||||||||||||||||||
| power up |
|
|
|
| on the |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Setting |
|
|
|
|
|
|
| Description |
|
| |||||||||||||
|
|
|
|
|
|
|
|
|
|
|
| value |
|
|
|
|
|
|
|
|
| ||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
| 0 |
| Positional deviation |
|
|
|
|
|
|
|
|
|
|
|
| |||||||||
|
|
|
|
| Power ON |
|
| [1] |
| Motor revolving speed |
|
|
|
|
|
|
|
|
|
|
|
| |||||||||||||
|
|
|
|
|
| 2 |
| Torque output |
|
|
|
|
|
|
|
|
|
|
|
| |||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||||||
|
|
|
|
|
|
|
|
|
|
|
| 3 |
| Control mode |
|
|
|
|
|
|
|
|
|
|
|
| |||||||||
|
|
|
|
|
|
|
|
|
|
|
| 4 |
| I/O signal status |
|
|
|
|
|
|
|
|
|
|
|
| |||||||||
|
|
|
|
|
|
|
|
|
|
|
| 5 |
| Error cause/record |
|
|
|
|
|
|
|
|
|
|
|
| |||||||||
|
|
|
|
|
|
|
|
|
|
|
| 6 |
| Software version |
|
|
|
|
|
|
|
|
|
|
|
| |||||||||
|
|
|
|
|
|
| Flashing during initialization |
| 7 |
| Alarm |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||
|
|
|
|
|
|
|
| 8 |
| Regenerative load ratio |
|
|
|
|
|
|
|
|
|
|
|
| |||||||||||||
|
|
|
|
|
|
| (about 2 seconds) |
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
| 9 |
| Overload load ratio |
|
|
|
|
|
|
|
|
|
|
|
| |||||||||
|
|
|
| Setting of Pr01 |
|
| 10 |
| Inertia ratio |
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||||||
|
|
|
|
|
| 11 |
| Feedback pulse sum |
|
|
|
|
|
|
|
|
|
|
|
| |||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||||||
|
|
|
|
|
|
|
|
|
|
|
| 12 |
| Command pulse sum |
|
|
|
|
|
|
|
|
|
|
|
| |||||||||
|
|
|
|
|
|
|
|
|
|
|
| 13 |
| External scale deviation |
|
|
|
|
|
|
|
|
|
|
|
| |||||||||
|
|
|
|
|
|
|
|
|
|
|
| 14 |
| External scale feedback pulse sum |
|
| |||||||||||||||||||
|
| See page 56 "Front Panel Key Operations and Display". | 15 |
| Motor auto recognition |
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||
02 | Control mode |
| 0 – 14 |
| Select the control mode of the servo driver. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||
|
|
| Setting |
|
| Control mode | *1 A special control mode focused on the |
| |||||||||||||||||||||||||||
|
|
| value | The 1st Mode |
| The 2nd Mode*1 |
| specification. For | details, refer |
| to |
| |||||||||||||||||||||||
|
|
| 0 | Position control |
|
|
| – |
| Control” volume on Page 000. |
|
|
|
|
|
|
|
|
|
|
|
| |||||||||||||
|
|
| [1] | Speed control |
|
|
| – | *2 When composite mode (Pr02 = 3,4,5,9,10) is set, |
| |||||||||||||||||||||||||
|
|
| 2 | Torque control |
|
|
| – |
| you can switch the 1st and 2nd modes with the |
| ||||||||||||||||||||||||
|
|
| 3 | Position |
|
|
|
| Speed control |
| control mode switch input |
| |||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||
|
|
| 4 | Position |
|
|
|
| Torque control |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
| 5 | Speed |
|
|
|
| Torque control |
|
|
|
|
|
|
|
|
| Closed |
|
|
|
|
|
|
|
|
|
|
|
| ||||
|
|
|
|
|
|
|
|
| Open |
|
|
|
|
|
|
|
|
| Open |
| |||||||||||||||
|
|
| 6 |
| – |
|
| The 1st |
|
|
|
|
|
| The 2nd |
|
|
|
|
|
|
| The 1st |
| |||||||||||
|
|
| 7 |
| – |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||
|
|
| 8 | Hybrid control |
|
|
| – |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||
|
|
| 9 | Speed |
|
|
|
| External encoder control |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
| 10 ms or longer | 10 ms or longer |
| ||||||||||||||||||||||
|
|
| 10 | Speed |
|
|
|
|
|
|
|
|
| ||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||
|
|
| 11 |
| – | <Caution> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||
|
|
| position control |
|
|
| Enter a command after 10ms or longer have passed |
| |||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
| |||||||||||||||||||||||||||
|
|
| 12 |
| – | since |
|
|
|
|
|
|
|
|
|
|
|
| |||||||||||||||||
|
|
|
| Do not enter any command on position, speed or |
| ||||||||||||||||||||||||||||||
|
|
| position control |
|
|
|
| ||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
| |||||||||||||||||||||||||||
|
|
|
|
|
|
|
| torque. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||
|
|
| 13 |
| – |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||
|
|
| speed control |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||
|
|
| 14 | Second |
| – |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
144