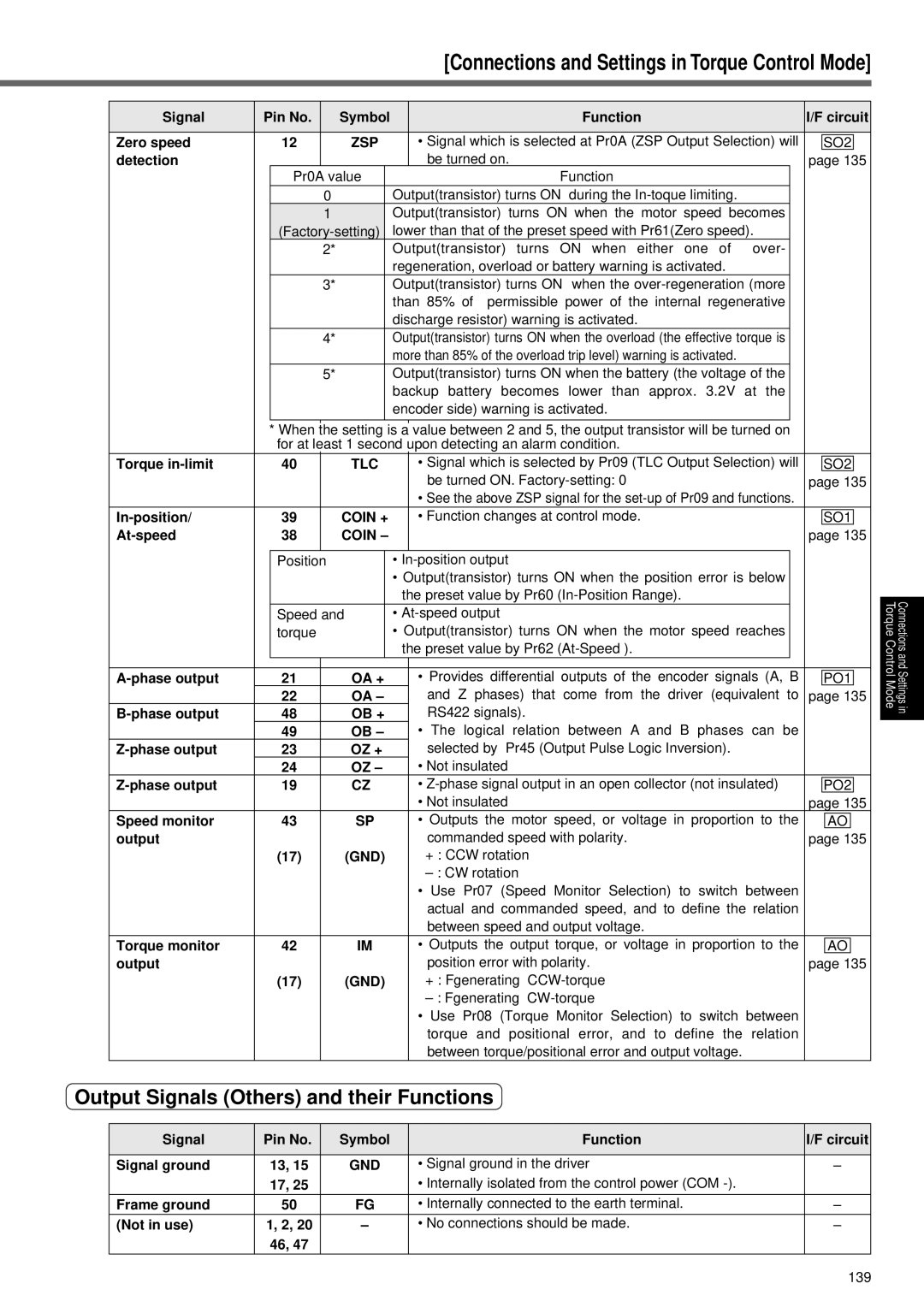
[Connections and Settings in Torque Control Mode]
Signal | Pin No. |
| Symbol |
| Function | I/F circuit | ||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Zero speed | 12 |
| ZSP |
| • Signal which is selected at Pr0A (ZSP Output Selection) will |
|
|
|
|
| ||||
|
|
| SO2 |
| ||||||||||
detection |
|
|
|
|
|
|
| be turned on. | page 135 | |||||
|
|
| Pr0A value |
|
| Function |
|
|
|
|
|
| ||
|
| 0 |
|
| Output(transistor) turns ON during the |
|
|
|
|
|
| |||
|
| 1 |
|
| Output(transistor) turns ON when the motor speed becomes |
|
|
|
|
|
| |||
|
|
| lower than that of the preset speed with Pr61(Zero speed). |
|
|
|
|
|
| |||||
|
| 2* |
|
| Output(transistor) turns ON when either one of over- |
|
|
|
|
|
| |||
|
|
|
|
|
|
| regeneration, overload or battery warning is activated. |
|
|
|
|
|
| |
|
| 3* |
|
| Output(transistor) turns ON when the |
|
|
|
|
|
| |||
|
|
|
|
|
|
| than 85% of permissible power of the internal regenerative |
|
|
|
|
|
| |
|
|
|
|
|
|
| discharge resistor) warning is activated. |
|
|
|
|
|
| |
|
| 4* |
|
| Output(transistor) turns ON when the overload (the effective torque is |
|
|
|
|
|
| |||
|
|
|
|
|
|
| more than 85% of the overload trip level) warning is activated. |
|
|
|
|
|
| |
|
| 5* |
|
| Output(transistor) turns ON when the battery (the voltage of the |
|
|
|
|
|
| |||
|
|
|
|
|
|
| backup battery becomes lower than approx. 3.2V at the |
|
|
|
|
|
| |
|
|
|
|
|
|
| encoder side) warning is activated. |
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
| |||
| * | When the setting is a value between 2 and 5, the output transistor will be turned on |
|
|
|
|
| |||||||
|
| for at least 1 second upon detecting an alarm condition. |
|
|
|
|
| |||||||
Torque | 40 |
| TLC |
| • Signal which is selected by Pr09 (TLC Output Selection) will |
| SO2 |
| ||||||
|
|
|
|
|
|
|
| be turned ON. | page 135 | |||||
|
|
|
|
|
|
|
| • See the above ZSP signal for the |
|
|
|
|
| |
39 |
| COIN + |
| • Function changes at control mode. |
|
|
|
|
| |||||
|
|
| SO1 |
| ||||||||||
38 |
| COIN – |
|
|
| page 135 | ||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Position |
|
| • |
|
|
|
|
|
| |||
|
|
|
|
|
|
| • Output(transistor) turns ON when the position error is below |
|
|
|
|
|
| |
|
|
|
|
|
|
| the preset value by Pr60 |
|
|
|
|
|
| |
|
| Speed and |
| • |
|
|
|
|
|
| ||||
|
| torque |
|
| • Output(transistor) turns ON when the motor speed reaches |
|
|
|
|
|
| |||
|
|
|
|
|
|
| the preset value by Pr62 |
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 21 |
| OA + |
| • Provides differential outputs of the encoder signals (A, B |
|
|
|
|
| ||||
|
|
| PO1 |
| ||||||||||
| 22 |
| OA – |
| and Z phases) that come from the driver (equivalent to | page 135 | ||||||||
48 |
| OB + |
| RS422 signals). |
|
|
|
|
| |||||
| 49 |
| OB – |
| • The logical relation between A and B phases can be |
|
|
|
|
| ||||
23 |
| OZ + |
| selected by Pr45 (Output Pulse Logic Inversion). |
|
|
|
|
| |||||
| 24 |
| OZ – |
| • Not insulated |
|
|
|
|
| ||||
19 |
| CZ |
| • |
|
|
|
|
| |||||
|
|
| PO2 |
| ||||||||||
|
|
|
|
|
|
|
| • Not insulated | page 135 | |||||
Speed monitor | 43 |
| SP |
| • Outputs the motor speed, or voltage in proportion to the |
|
|
|
| |||||
|
|
|
| AO |
|
| ||||||||
output |
|
|
|
|
|
|
| commanded speed with polarity. | page 135 | |||||
| (17) |
| (GND) |
| + : CCW rotation |
|
|
|
|
| ||||
|
|
|
|
|
|
|
|
|
|
|
|
| ||
|
|
|
|
|
|
|
| • Use Pr07 (Speed Monitor Selection) to switch between |
|
|
|
|
| |
|
|
|
|
|
|
|
| actual and commanded speed, and to define the relation |
|
|
|
|
| |
|
|
|
|
|
|
|
| between speed and output voltage. |
|
|
|
|
| |
Torque monitor | 42 |
| IM |
| • Outputs the output torque, or voltage in proportion to the |
|
|
|
| |||||
|
|
|
| AO |
|
| ||||||||
output |
|
|
|
|
|
|
| position error with polarity. | page 135 | |||||
| (17) |
| (GND) |
| + : Fgenerating |
|
|
|
|
| ||||
|
|
|
|
|
|
|
|
|
|
|
|
| ||
|
|
|
|
|
|
|
| • Use Pr08 (Torque Monitor Selection) to switch between |
|
|
|
|
| |
|
|
|
|
|
|
|
| torque and positional error, and to define the relation |
|
|
|
|
| |
|
|
|
|
|
|
|
| between torque/positional error and output voltage. |
|
|
|
|
| |
Output Signals (Others) and their Functions
Signal | Pin No. | Symbol | Function | I/F circuit |
|
|
|
|
|
Signal ground | 13, 15 | GND | • Signal ground in the driver | – |
| 17, 25 |
| • Internally isolated from the control power (COM |
|
Frame ground | 50 | FG | • Internally connected to the earth terminal. | – |
(Not in use) | 1, 2, 20 | – | • No connections should be made. | – |
| 46, 47 |
|
|
|
Torque Control Mode
Connections and Settings in
139