CN X5 Connector
Input signal assignment to CN X5 connector pins - designation(logic)
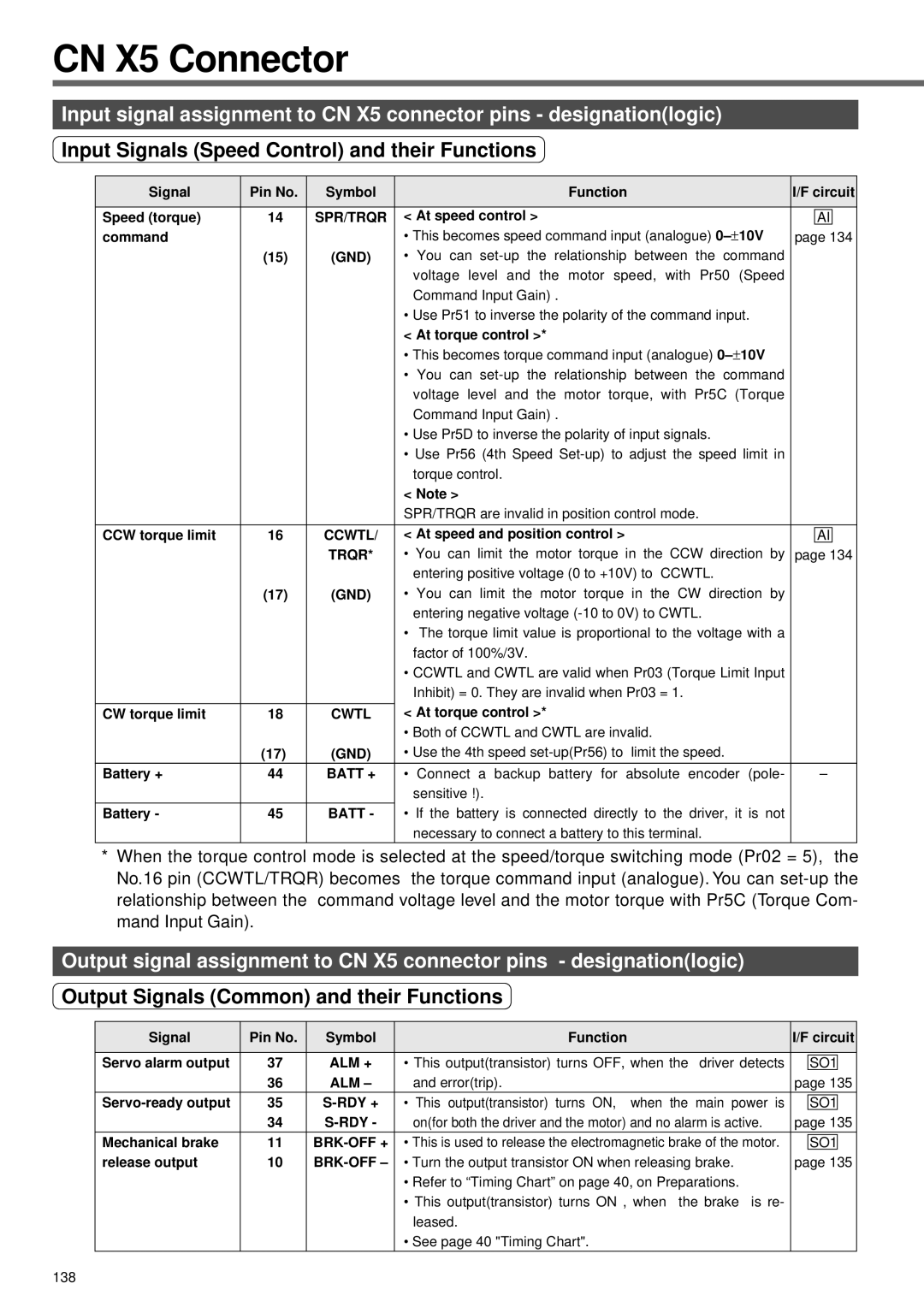
Input Signals (Speed Control) and their Functions
Signal | Pin No. | Symbol | Function | I/F circuit |
|
|
|
|
|
Speed (torque) | 14 | SPR/TRQR | < At speed control > | AI |
command |
|
| • This becomes speed command input (analogue) | page 134 |
| (15) | (GND) | • You can |
|
|
|
| voltage level and the motor speed, with Pr50 (Speed |
|
|
|
| Command Input Gain) . |
|
|
|
| • Use Pr51 to inverse the polarity of the command input. |
|
|
|
| < At torque control >* |
|
|
|
| • This becomes torque command input (analogue) |
|
|
|
| • You can |
|
|
|
| voltage level and the motor torque, with Pr5C (Torque |
|
|
|
| Command Input Gain) . |
|
|
|
| • Use Pr5D to inverse the polarity of input signals. |
|
|
|
| • Use Pr56 (4th Speed |
|
|
|
| torque control. |
|
|
|
| < Note > |
|
|
|
| SPR/TRQR are invalid in position control mode. |
|
|
|
|
|
|
CCW torque limit | 16 | CCWTL/ | < At speed and position control > | AI |
|
| TRQR* | • You can limit the motor torque in the CCW direction by | page 134 |
|
|
| entering positive voltage (0 to +10V) to CCWTL. |
|
| (17) | (GND) | • You can limit the motor torque in the CW direction by |
|
|
|
| entering negative voltage |
|
|
|
| • The torque limit value is proportional to the voltage with a |
|
|
|
| factor of 100%/3V. |
|
|
|
| • CCWTL and CWTL are valid when Pr03 (Torque Limit Input |
|
|
|
| Inhibit) = 0. They are invalid when Pr03 = 1. |
|
|
|
| < At torque control >* |
|
CW torque limit | 18 | CWTL |
| |
|
|
| • Both of CCWTL and CWTL are invalid. |
|
| (17) | (GND) | • Use the 4th speed |
|
Battery + | 44 | BATT + | • Connect a backup battery for absolute encoder (pole- | – |
|
|
| sensitive !). |
|
Battery - | 45 | BATT - | • If the battery is connected directly to the driver, it is not |
|
|
|
| necessary to connect a battery to this terminal. |
|
*When the torque control mode is selected at the speed/torque switching mode (Pr02 = 5), the No.16 pin (CCWTL/TRQR) becomes the torque command input (analogue). You can
Output signal assignment to CN X5 connector pins - designation(logic) Output Signals (Common) and their Functions
Signal | Pin No. | Symbol | Function |
| I/F circuit | ||
|
|
|
|
|
|
|
|
Servo alarm output | 37 | ALM + | • This output(transistor) turns OFF, when the | driver detects |
|
|
|
| SO1 |
| |||||
| 36 | ALM – | and error(trip). |
| page 135 | ||
35 | • This output(transistor) turns ON, when the | main power is |
|
|
| ||
| SO1 |
| |||||
| 34 | on(for both the driver and the motor) and no alarm is active. | page 135 | ||||
Mechanical brake | 11 | • This is used to release the electromagnetic brake of the motor. |
|
|
| ||
| SO1 |
| |||||
release output | 10 |
| • Turn the output transistor ON when releasing brake. | page 135 | |||
|
|
| • Refer to “Timing Chart” on page 40, on Preparations. |
|
|
| |
|
|
| • This output(transistor) turns ON , when the brake is re- |
|
|
| |
|
|
| leased. |
|
|
|
|
|
|
| • See page 40 "Timing Chart". |
|
|
|
|
138