CN X5 Connector
Input signal (common) assignment to CN X5 connector pins
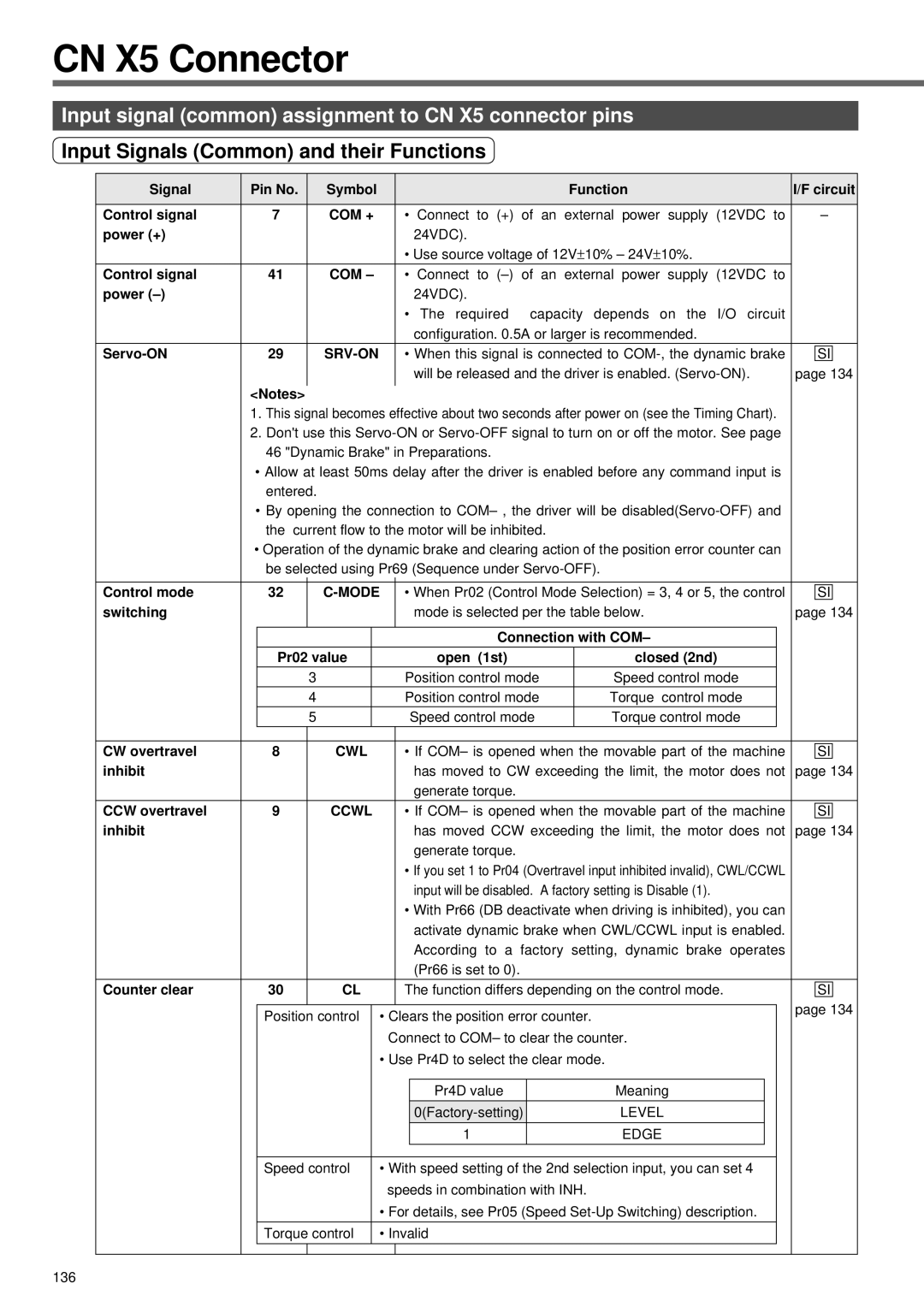
Input Signals (Common) and their Functions
Signal |
| Pin No. |
| Symbol |
|
|
| Function | I/F circuit | |||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
Control signal | 7 |
| COM + |
| • Connect to (+) of an external power supply (12VDC to | – | ||||||||||
power (+) |
|
|
|
|
|
|
|
| 24VDC). |
|
|
|
|
| ||
|
|
|
|
|
|
|
| • Use source voltage of 12V±10% – 24V±10%. |
| |||||||
Control signal | 41 |
| COM – |
| • Connect to |
| ||||||||||
power |
|
|
|
|
|
|
|
| 24VDC). |
|
|
|
|
| ||
|
|
|
|
|
|
|
| • The required capacity | depends on the I/O circuit |
| ||||||
|
|
|
|
|
|
|
|
| configuration. 0.5A or larger is recommended. |
| ||||||
29 |
|
|
| • When this signal is connected to | SI | |||||||||||
|
|
|
|
|
|
|
|
| will be released and the driver is enabled. | page 134 | ||||||
|
| <Notes> |
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
| 1. This signal becomes effective about two seconds after power on (see the Timing Chart). |
|
| ||||||||||||
|
| 2. Don't use this |
|
| ||||||||||||
|
|
| 46 "Dynamic Brake" in Preparations. |
|
|
|
|
| ||||||||
|
| • Allow at least 50ms delay after the driver is enabled before any command input is |
|
| ||||||||||||
|
|
| entered. |
|
|
|
|
|
|
|
|
|
|
|
| |
|
| • By opening the connection to |
|
| ||||||||||||
|
|
| the current flow to the motor will be inhibited. |
|
|
|
|
| ||||||||
|
| • Operation of the dynamic brake and clearing action of the position error counter can |
|
| ||||||||||||
|
|
| be selected using Pr69 (Sequence under |
|
| |||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||
Control mode | 32 |
|
| • When Pr02 (Control Mode Selection) = 3, 4 or 5, the control | SI | |||||||||||
switching |
|
|
|
|
|
|
|
| mode is selected per the table below. | page 134 | ||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
| Connection with COM– |
|
| |||||
|
|
| Pr02 value |
|
|
| open (1st) |
| closed (2nd) |
|
|
| ||||
|
|
| 3 |
|
|
| Position control mode |
| Speed control mode |
|
|
| ||||
|
|
| 4 |
|
|
| Position control mode |
| Torque control mode |
|
|
| ||||
|
|
| 5 |
|
|
|
| Speed control mode |
| Torque control mode |
|
|
| |||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
CW overtravel | 8 |
| CWL |
| • If COM– is opened when the movable part of the machine | SI | ||||||||||
inhibit |
|
|
|
|
|
|
|
| has moved to CW exceeding the limit, the motor does not | page 134 | ||||||
|
|
|
|
|
|
|
|
| generate torque. |
|
|
|
|
| ||
CCW overtravel | 9 |
| CCWL |
| • If COM– is opened when the movable part of the machine | SI | ||||||||||
inhibit |
|
|
|
|
|
|
|
| has moved CCW exceeding the limit, the motor does not | page 134 | ||||||
|
|
|
|
|
|
|
|
| generate torque. |
|
|
|
|
| ||
|
|
|
|
|
|
|
| • If you set 1 to Pr04 (Overtravel input inhibited invalid), CWL/CCWL |
| |||||||
|
|
|
|
|
|
|
|
| input will be disabled. A factory setting is Disable (1). |
| ||||||
|
|
|
|
|
|
|
| • With Pr66 (DB deactivate when driving is inhibited), you can |
| |||||||
|
|
|
|
|
|
|
|
| activate dynamic brake when CWL/CCWL input is enabled. |
| ||||||
|
|
|
|
|
|
|
|
| According to a factory setting, dynamic brake operates |
| ||||||
|
|
|
|
|
|
|
|
| (Pr66 is set to 0). |
|
|
|
|
| ||
Counter clear | 30 |
| CL |
| The function differs depending on the control mode. | SI | ||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| page 134 |
|
|
| Position control |
| • Clears the position error counter. |
|
|
|
| |||||||
|
|
|
|
|
|
|
|
| ||||||||
|
|
|
|
|
|
| Connect to COM– to clear the counter. |
|
| |||||||
|
|
|
|
|
|
| • Use Pr4D to select the clear mode. |
|
| |||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||
|
|
|
|
|
|
|
|
| Pr4D value |
| Meaning |
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||
|
|
|
|
|
|
|
|
|
|
| LEVEL |
|
|
|
| |
|
|
|
|
|
|
|
|
| 1 |
|
| EDGE |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Speed control |
| • With speed setting of the 2nd selection input, you can set 4 |
|
|
| ||||||||
|
|
|
|
|
|
| speeds in combination with INH. |
|
|
|
|
| ||||
|
|
|
|
|
|
| • For details, see Pr05 (Speed |
|
| |||||||
|
|
|
|
|
|
|
|
|
|
|
|
| ||||
|
|
| Torque control |
| • Invalid |
|
|
|
|
| ||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
136