Parameter Setting
Parameters for real time auto gain tuning
|
|
|
|
|
|
|
|
| Default setting is shown by [ ] | ||||
Parameter | Parameter Name | Setting | Unit |
|
|
| Function/Description |
|
|
| |||
No. | range |
|
|
|
|
|
| ||||||
|
|
|
|
|
|
|
|
|
|
| |||
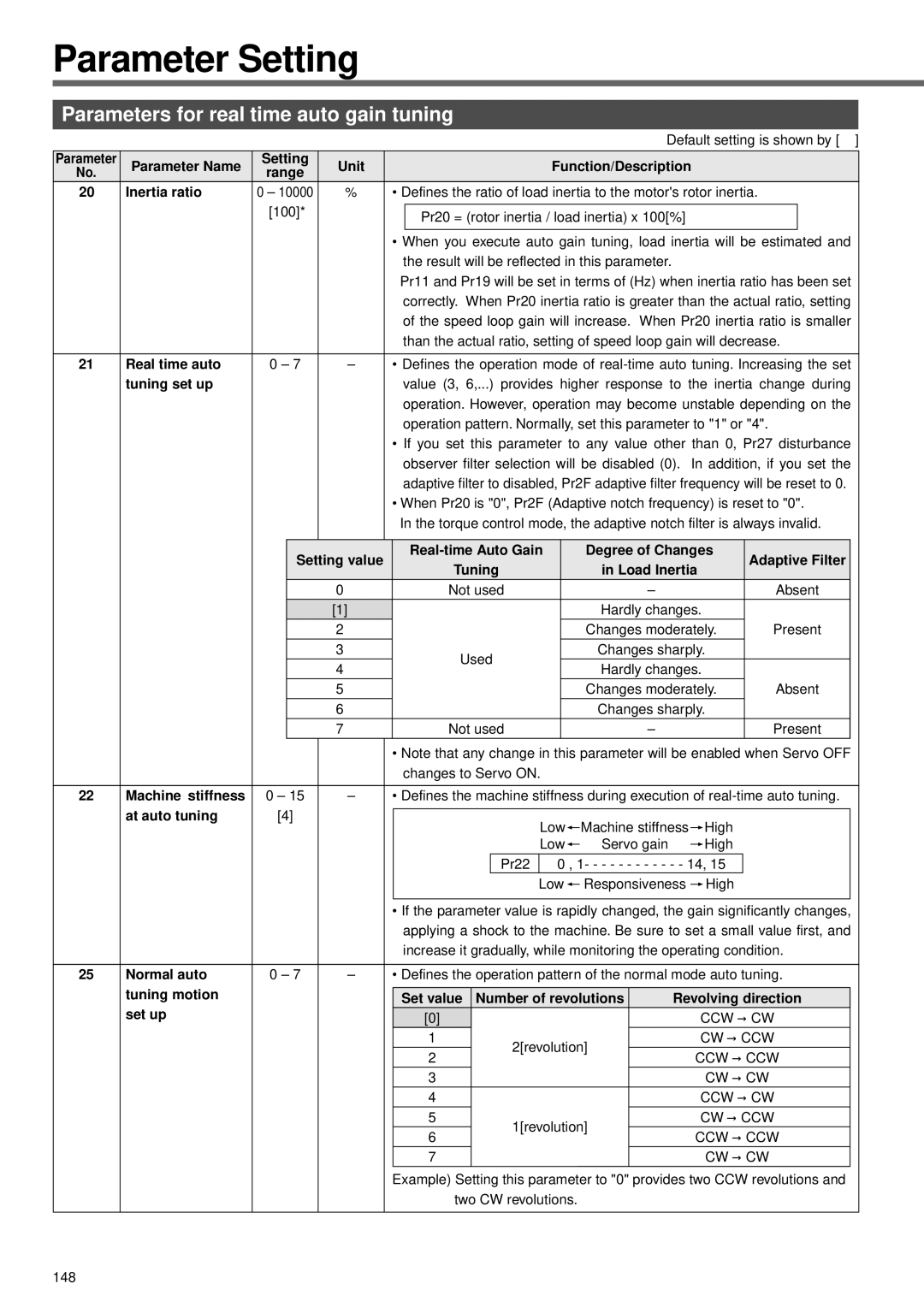
20 | Inertia ratio | 0 – 10000 | % |
| • Defines the ratio of load inertia to the motor's rotor inertia. |
|
|
| |||||
|
| [100]* |
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
| Pr20 = (rotor inertia / load inertia) x 100[%] |
|
|
| |||||
|
|
|
|
|
|
|
|
|
| ||||
|
|
|
|
|
|
|
|
|
|
|
| ||
|
|
|
|
|
| • When you execute auto gain tuning, load inertia will be estimated and | |||||||
|
|
|
|
|
| the result will be reflected in this parameter. |
|
|
| ||||
|
|
|
|
|
| Pr11 and Pr19 will be set in terms of (Hz) when inertia ratio has been set | |||||||
|
|
|
|
|
| correctly. When Pr20 inertia ratio is greater than the actual ratio, setting | |||||||
|
|
|
|
|
| of the speed loop gain will increase. When Pr20 inertia ratio is smaller | |||||||
|
|
|
|
|
| than the actual ratio, setting of speed loop gain will decrease. | |||||||
|
|
|
|
|
|
|
|
|
| ||||
21 | Real time auto | 0 – 7 | – |
| • Defines the operation mode of | ||||||||
| tuning set up |
|
|
|
| value (3, 6,...) provides higher response to the inertia change during | |||||||
|
|
|
|
|
| operation. However, operation may become unstable depending on the | |||||||
|
|
|
|
|
| operation pattern. Normally, set this parameter to "1" or "4". |
|
|
| ||||
|
|
|
|
|
| • If you set this parameter to any value other than 0, Pr27 disturbance | |||||||
|
|
|
|
|
| observer filter selection will be disabled (0). In addition, if you set the | |||||||
|
|
|
|
|
| adaptive filter to disabled, Pr2F adaptive filter frequency will be reset to 0. | |||||||
|
|
|
|
|
| • When Pr20 is "0", Pr2F (Adaptive notch frequency) is reset to "0". | |||||||
|
|
|
|
|
| In the torque control mode, the adaptive notch filter is always invalid. | |||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Setting value |
|
|
| Degree of Changes | Adaptive Filter |
| ||||
|
|
|
|
| Tuning |
| in Load Inertia |
| |||||
|
|
|
|
|
|
|
|
|
|
|
| ||
|
|
|
| 0 |
|
| Not used |
| – |
| Absent |
| |
|
|
|
| [1] |
|
|
|
| Hardly changes. |
|
|
|
|
|
|
|
| 2 |
|
|
|
| Changes moderately. |
| Present |
| |
|
|
|
| 3 |
|
| Used |
| Changes sharply. |
|
|
|
|
|
|
|
| 4 |
|
|
| Hardly changes. |
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
| ||
|
|
|
| 5 |
|
|
|
| Changes moderately. |
| Absent |
| |
|
|
|
| 6 |
|
|
|
| Changes sharply. |
|
|
|
|
|
|
|
| 7 |
|
| Not used |
| – |
| Present |
| |
•Note that any change in this parameter will be enabled when Servo OFF changes to Servo ON.
22 | Machine stiffness | 0 – 15 | – | • Defines the machine stiffness during execution of | |||||||||||
| at auto tuning | [4] |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Low |
| Machine stiffness |
| High |
| |||||
|
|
|
|
|
|
|
|
|
| ||||||
|
|
|
|
|
|
|
|
|
| ||||||
|
|
|
|
|
|
| Low |
| Servo gain |
|
| High |
| ||
|
|
|
|
|
|
|
|
|
|
| |||||
|
|
|
|
|
| Pr22 | 0 , 1- - - - - - | - - - - | - - 14, 15 |
|
| ||||
|
|
|
|
|
|
| Low |
| Responsiveness |
| High |
| |||
|
|
|
|
|
|
|
|
|
| ||||||
|
|
|
|
|
|
|
|
|
|
| |||||
|
|
|
| • If the parameter value is rapidly changed, the gain significantly changes, | |||||||||||
|
|
|
| applying a shock to the machine. Be sure to set a small value first, and | |||||||||||
|
|
|
| increase it gradually, while monitoring the operating condition. | |||||||||||
|
|
|
|
|
|
|
|
|
| ||||||
25 | Normal auto | 0 – 7 | – | • Defines the operation pattern of the normal mode auto tuning. | |||||||||||
| tuning motion |
|
|
|
|
|
|
|
|
|
|
|
| ||
|
|
| Set value | Number of revolutions |
| Revolving direction |
| ||||||||
| set up |
|
| [0] |
|
|
|
|
|
|
|
| CCW |
| |
|
|
|
| 1 |
| 2[revolution] |
|
|
| CW |
| ||||
|
|
|
| 2 |
|
|
| CCW |
| ||||||
|
|
|
|
|
|
|
|
|
|
|
| ||||
|
|
|
| 3 |
|
|
|
|
|
|
|
| CW |
| |
|
|
|
| 4 |
|
|
|
|
|
|
|
| CCW |
| |
|
|
|
| 5 |
| 1[revolution] |
|
|
| CW |
| ||||
|
|
|
| 6 |
|
|
| CCW |
| ||||||
|
|
|
|
|
|
|
|
|
|
|
| ||||
|
|
|
| 7 |
|
|
|
|
|
|
|
| CW |
| |
|
|
|
| Example) Setting this parameter to "0" provides two CCW revolutions and | |||||||||||
|
|
|
| two CW revolutions. |
|
|
|
|
|
|
| ||||
148