[Connections and Settings in Torque Control Mode]
Parameters for Speed Control
|
|
|
| Default setting is shown by [ ] | |
Parameter | Parameter Name | Setting | Unit | Function/Description | |
No. | range | ||||
|
|
| |||
52 | Velocity | • This parameter adjusts offset of external analog speed command system | |||
| command | – 2047 |
| including the host device. | |
| offset | [0] |
| • Offset volume will be approximately 0.3mV per a set value “1”. | |
•To adjust offset, there are 2 ways of (1) manual adjustment and (2) auto- matic adjustment.
1) Manual adjustment
• When you make offset adjustment with the driver only:
Using this parameter, set a value that prevents the motor from rotat- ing, after you have correctly input 0V in torque command input (SPR/TRQR) (or connected to signal ground).
•When the host device establishes a position loop:
With servo locked, using this parameter, set a value so that deviation pulse will be zero.
2) Automatic Adjustment
•For details on operating instructions in automatic offset adjustment mode, refer to “Details of Execution Display of Auxiliary Function Mode” of Preparations volume on page 66.
•When you execute automatic offset adjustment, result will be reflec- ted in this parameter Pr52.
56 | 4th internal | r/min | The parameter directly sets the 1st to 4th speed of internal command | |
| speed | – 20000 |
| speed of when setting of internal speed has been enabled with the para- |
|
| [0] |
| meter “speed setting internal/external switching” (Pr05), to Pr53 to Pr56, |
|
|
|
| respectively, in the unit of [r/min]. |
|
|
|
| <Caution> |
|
|
|
| Polarity of settings shows that of internal command speed. |
+CCW direction viewed from the edge of axis for (+) command
–CW direction viewed from the edge of axis for
Pr56 is a value of speed limits in torque control mode.
You should set this parameter in a range of rotational speeds of the motor to be used.
57 | JOG speed set up 0 – 500 r/min The parameter directly sets JOG speed in JOG run in “motor trial run |
[300]mode” in terms of [r/min].
For details on JOG function, refer to “Trial Run (JOG)” of Preparations vol- ume on page 68.
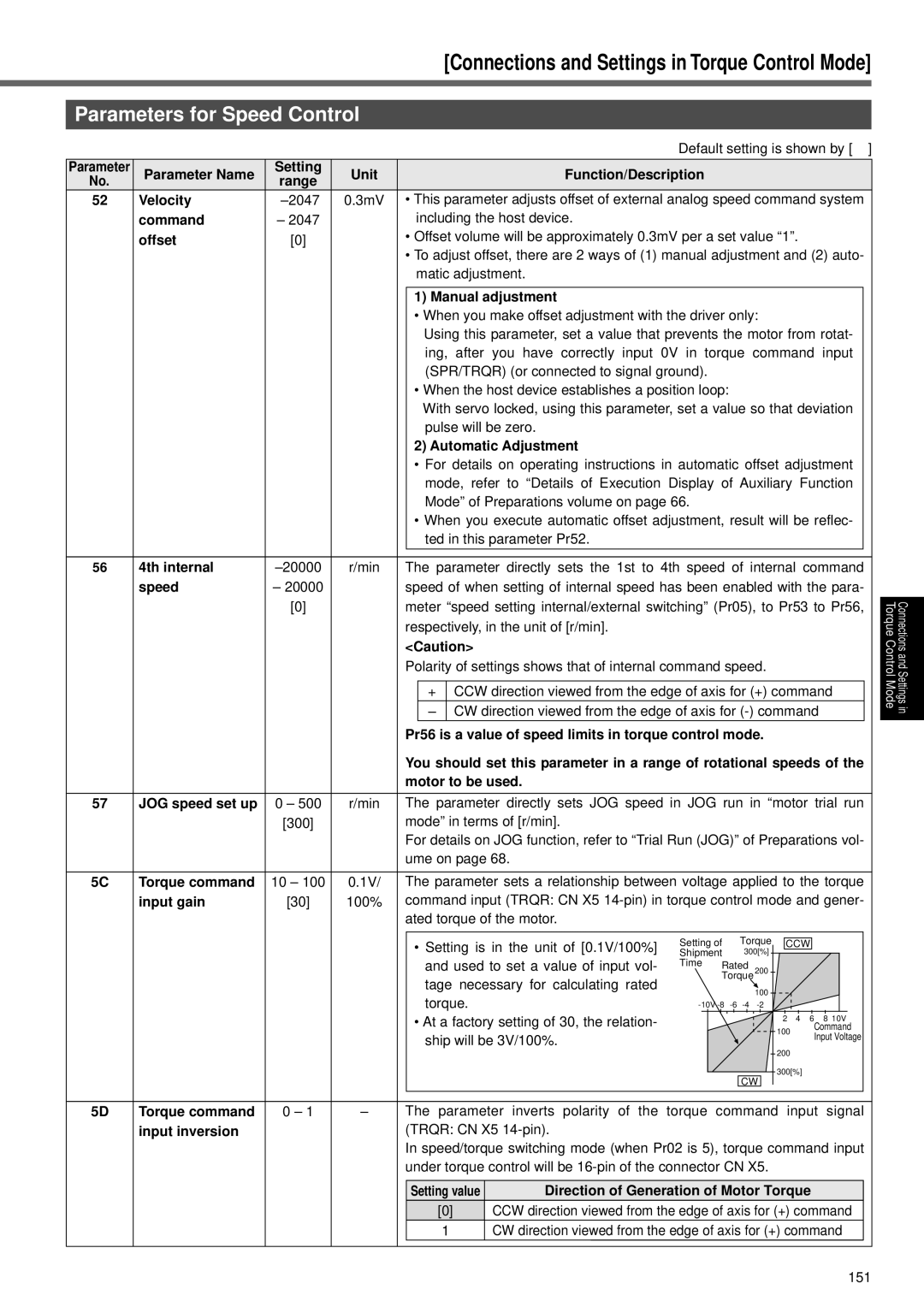
5C | Torque command | 10 – 100 | 0.1V/ | The parameter sets a relationship between voltage applied to the torque |
| input gain | [30] | 100% | command input (TRQR: CN X5 |
|
|
|
| ated torque of the motor. |
• Setting is in the unit of [0.1V/100%] | Setting of |
| Torque | CCW |
| ||||
Shipment |
| 300[%] |
|
|
|
| |||
and used to set a value of input vol- | Time | Rated | 200 |
|
|
|
| ||
|
|
|
|
| |||||
tage necessary for calculating rated |
| Torque |
|
|
|
|
| ||
|
|
|
| 100 |
|
|
|
| |
torque. |
|
|
|
|
|
|
|
| |
|
|
|
| ||||||
• At a factory setting of 30, the relation- |
|
|
|
|
| 2 | 4 | 6 | 8 10V |
|
|
|
|
| 100 |
| Command | ||
ship will be 3V/100%. |
|
|
|
|
|
| Input Voltage | ||
|
|
|
|
|
|
| |||
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
| 200 |
|
|
|
|
|
|
| CW | 300[%] |
|
| ||
|
|
|
|
|
|
|
| ||
5D | Torque command | 0 – 1 | – | The parameter inverts polarity of the torque command input signal | |
| input inversion |
|
| (TRQR: CN X5 | |
|
|
|
| In speed/torque switching mode (when Pr02 is 5), torque command input | |
|
|
|
| under torque control will be | |
|
|
|
|
|
|
|
|
|
| Setting value | Direction of Generation of Motor Torque |
[0]CCW direction viewed from the edge of axis for (+) command
1 CW direction viewed from the edge of axis for (+) command
Torque Control Mode
Connections and Settings in
151