The CAN channel is
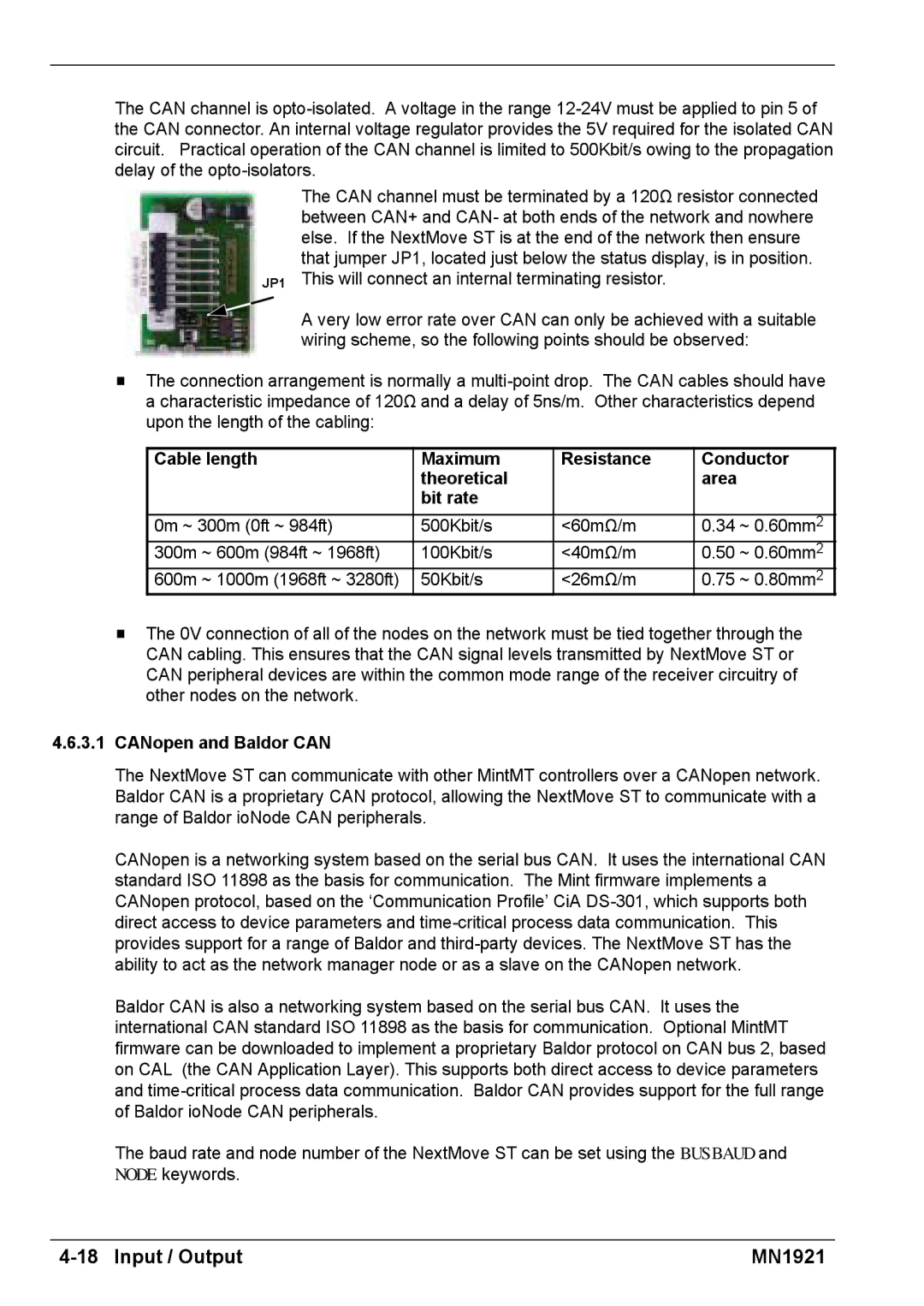
The CAN channel must be terminated by a 120Ω resistor connected between CAN+ and CAN- at both ends of the network and nowhere else. If the NextMove ST is at the end of the network then ensure that jumper JP1, located just below the status display, is in position.
JP1 This will connect an internal terminating resistor.
A very low error rate over CAN can only be achieved with a suitable wiring scheme, so the following points should be observed:
HThe connection arrangement is normally a
Cable length | Maximum | Resistance | Conductor | |
|
| theoretical |
| area |
|
| bit rate |
|
|
0m ~ 300m (0ft ~ 984ft) | 500Kbit/s | <60mΩ/m | 0.34 ~ 0.60mm2 | |
300m | ~ 600m (984ft ~ 1968ft) | 100Kbit/s | <40mΩ/m | 0.50 ~ 0.60mm2 |
600m | ~ 1000m (1968ft ~ 3280ft) | 50Kbit/s | <26mΩ/m | 0.75 ~ 0.80mm2 |
HThe 0V connection of all of the nodes on the network must be tied together through the CAN cabling. This ensures that the CAN signal levels transmitted by NextMove ST or CAN peripheral devices are within the common mode range of the receiver circuitry of other nodes on the network.
4.6.3.1CANopen and Baldor CAN
The NextMove ST can communicate with other MintMT controllers over a CANopen network. Baldor CAN is a proprietary CAN protocol, allowing the NextMove ST to communicate with a range of Baldor ioNode CAN peripherals.
CANopen is a networking system based on the serial bus CAN. It uses the international CAN standard ISO 11898 as the basis for communication. The Mint firmware implements a CANopen protocol, based on the ‘Communication Profile’ CiA
Baldor CAN is also a networking system based on the serial bus CAN. It uses the international CAN standard ISO 11898 as the basis for communication. Optional MintMT firmware can be downloaded to implement a proprietary Baldor protocol on CAN bus 2, based on CAL (the CAN Application Layer). This supports both direct access to device parameters and
The baud rate and node number of the NextMove ST can be set using the BUSBAUD and NODE keywords.
MN1921 |