CANopen Communication Module DVPCOPM-SL
4.4Saving the Configuration Data
Select “File” => "Save” to save the current configuration data.
4.5CANopen Network Control
In this section, we will introduce how to compile WPL program and control CANopen network.
zTarget:
1.When SW0 on Slave 3 is closed, the servo drive on Slave 2 will start to run.
2.When SW0 on Slave 3 is open, the servo drive on Slave 2 will stop.
3.When the status of SW1 and SW2 on Slave 3 is switched, the running speed of servo drive on Slave 2 can be modified.
4.When the servo drive is running, the signal LED on Slave 2 will be On.
5.When the servo drive stops, the signal LED on Slave 2 will be Off.
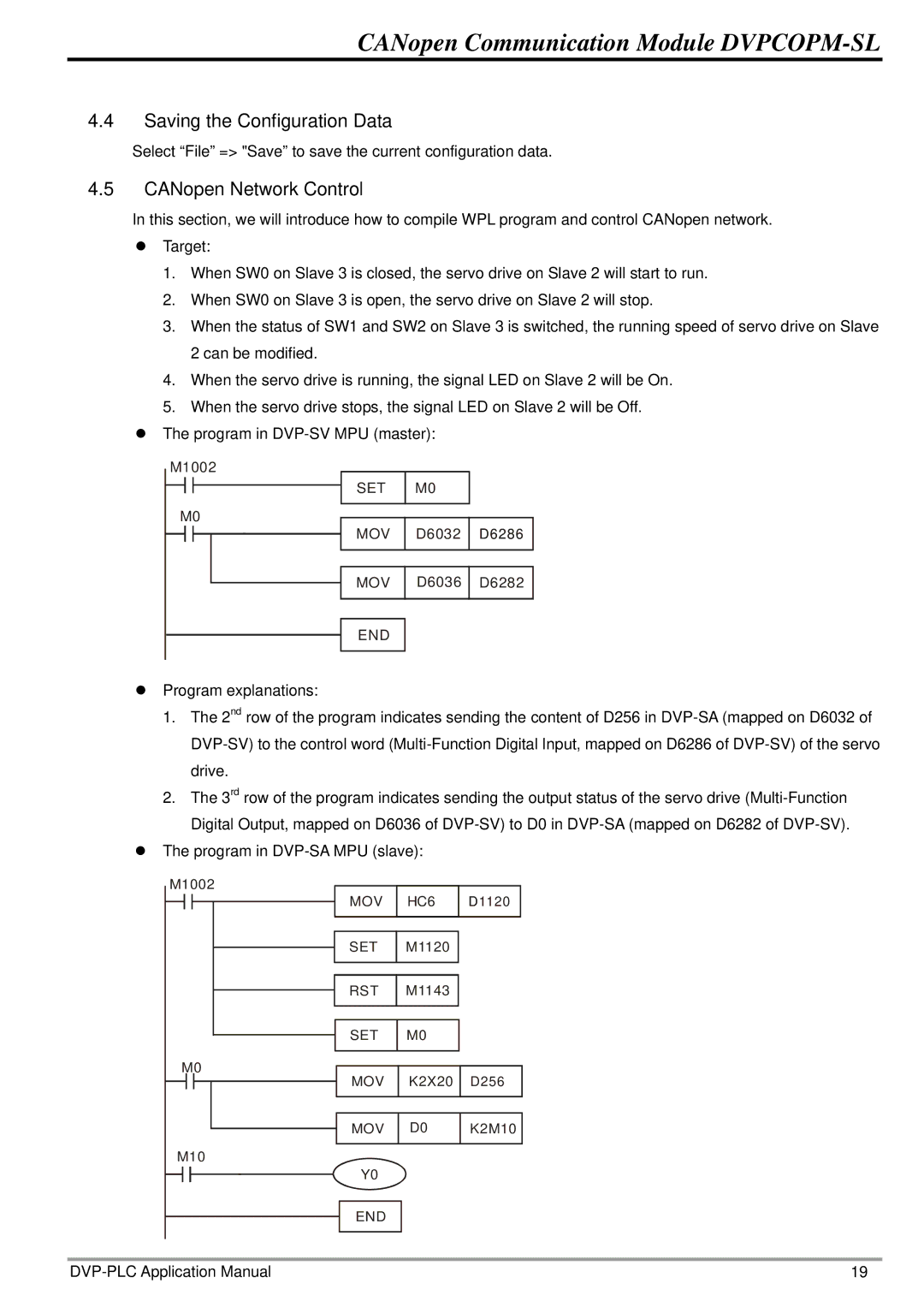
zThe program in
M1002
SET M0
M0
MOV D6032 D6286
MOV D6036 D6282
END
zProgram explanations:
1.The 2nd row of the program indicates sending the content of D256 in
2.The 3rd row of the program indicates sending the output status of the servo drive
zThe program in
M1002
MOV HC6 D1120
SET M1120
RST M1143
SET M0
M0
MOV K2X20 D256
MOV D0 K2M10
M10
Y0
END
19 |