6 Operation | IL•1F CANopen DS301 |
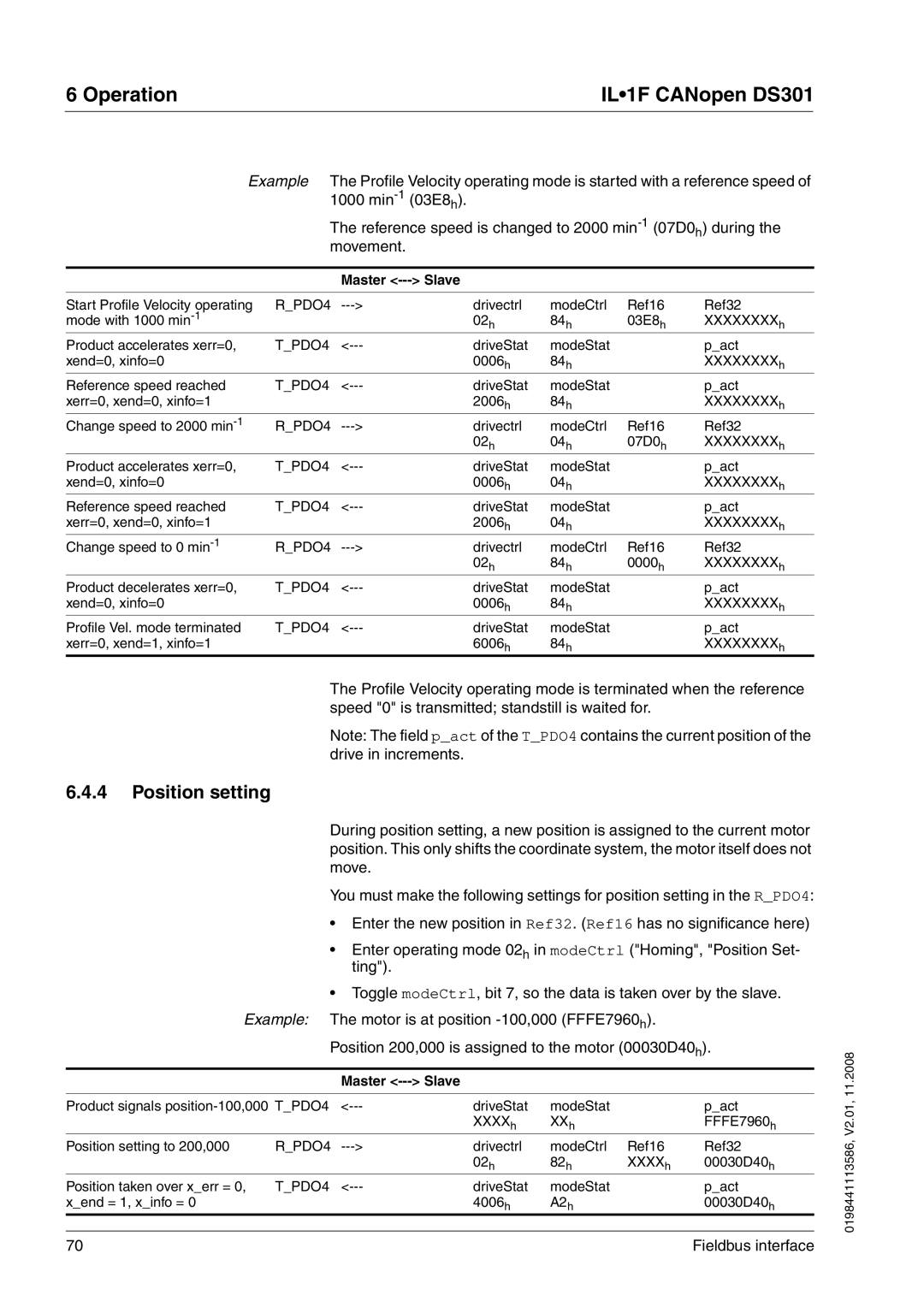
Example The Profile Velocity operating mode is started with a reference speed of 1000
The reference speed is changed to 2000
|
| Master | > Slave |
|
|
|
Start Profile Velocity operating | R_PDO4 | drivectrl | modeCtrl | Ref16 | Ref32 | |
mode with 1000 |
|
| 02h | 84h | 03E8h | XXXXXXXXh |
Product accelerates xerr=0, | T_PDO4 | driveStat | modeStat |
| p_act | |
xend=0, xinfo=0 |
|
| 0006h | 84h |
| XXXXXXXXh |
Reference speed reached | T_PDO4 | driveStat | modeStat |
| p_act | |
xerr=0, xend=0, xinfo=1 |
|
| 2006h | 84h |
| XXXXXXXXh |
Change speed to 2000 | R_PDO4 | drivectrl | modeCtrl | Ref16 | Ref32 | |
|
|
| 02h | 04h | 07D0h | XXXXXXXXh |
Product accelerates xerr=0, | T_PDO4 | driveStat | modeStat |
| p_act | |
xend=0, xinfo=0 |
|
| 0006h | 04h |
| XXXXXXXXh |
Reference speed reached | T_PDO4 | driveStat | modeStat |
| p_act | |
xerr=0, xend=0, xinfo=1 |
|
| 2006h | 04h |
| XXXXXXXXh |
Change speed to 0 | R_PDO4 | drivectrl | modeCtrl | Ref16 | Ref32 | |
|
|
| 02h | 84h | 0000h | XXXXXXXXh |
Product decelerates xerr=0, | T_PDO4 | driveStat | modeStat |
| p_act | |
xend=0, xinfo=0 |
|
| 0006h | 84h |
| XXXXXXXXh |
Profile Vel. mode terminated | T_PDO4 | driveStat | modeStat |
| p_act | |
xerr=0, xend=1, xinfo=1 |
|
| 6006h | 84h |
| XXXXXXXXh |
The Profile Velocity operating mode is terminated when the reference speed "0" is transmitted; standstill is waited for.
Note: The field p_act of the T_PDO4 contains the current position of the drive in increments.
6.4.4Position setting
During position setting, a new position is assigned to the current motor position. This only shifts the coordinate system, the motor itself does not move.
You must make the following settings for position setting in the R_PDO4:
•Enter the new position in Ref32. (Ref16 has no significance here)
•Enter operating mode 02h in modeCtrl ("Homing", "Position Set- ting").
•Toggle modeCtrl, bit 7, so the data is taken over by the slave.
Example: | The motor is at position |
| ||||
|
| Position 200,000 is assigned to the motor (00030D40h). | ||||
|
|
|
|
|
|
|
|
| Master |
|
|
|
|
|
|
|
|
|
| |
Product signals | driveStat | modeStat |
| p_act | ||
|
|
| XXXXh | XXh |
| FFFE7960h |
Position setting to 200,000 | R_PDO4 | drivectrl | modeCtrl | Ref16 | Ref32 | |
|
|
| 02h | 82h | XXXXh | 00030D40h |
Position taken over x_err = 0, | T_PDO4 | driveStat | modeStat |
| p_act | |
x_end = 1, x_info = 0 |
|
| 4006h | A2h |
| 00030D40h |
0198441113586, V2.01, 11.2008
70 | Fieldbus interface |