IL•1F CANopen DS301 | 3 Basics |
Example of short positioning The master starts a positioning movement that will only take a very short time. The duration is shorter than the polling cycle of the master. At point in time t1 the movement is already complete. Using bit x_end, the mas- ter does not know whether the movement is already complete or has not yet been started. However, it detects this with the MT bit from the slave:
Master | Slave | Slave |
|
MT | MT | x_end |
|
|
|
|
|
1 | 0 | 1 | Slave has not yet detected command |
|
|
|
|
1 | 1 | 0 | Slave has detected command, positioning |
|
|
| running |
|
|
|
|
1 | 1 | 1 | Slave signals that positioning is complete |
|
|
|
|
The master may only evaluate data in which the received MT bit is iden- tical to the last bit transmitted by the master.
Master | Slave |
| t0 |
| |||
|
|
Mode Toggle
1
Mode Toggle
x_end
t1
t2
2 3
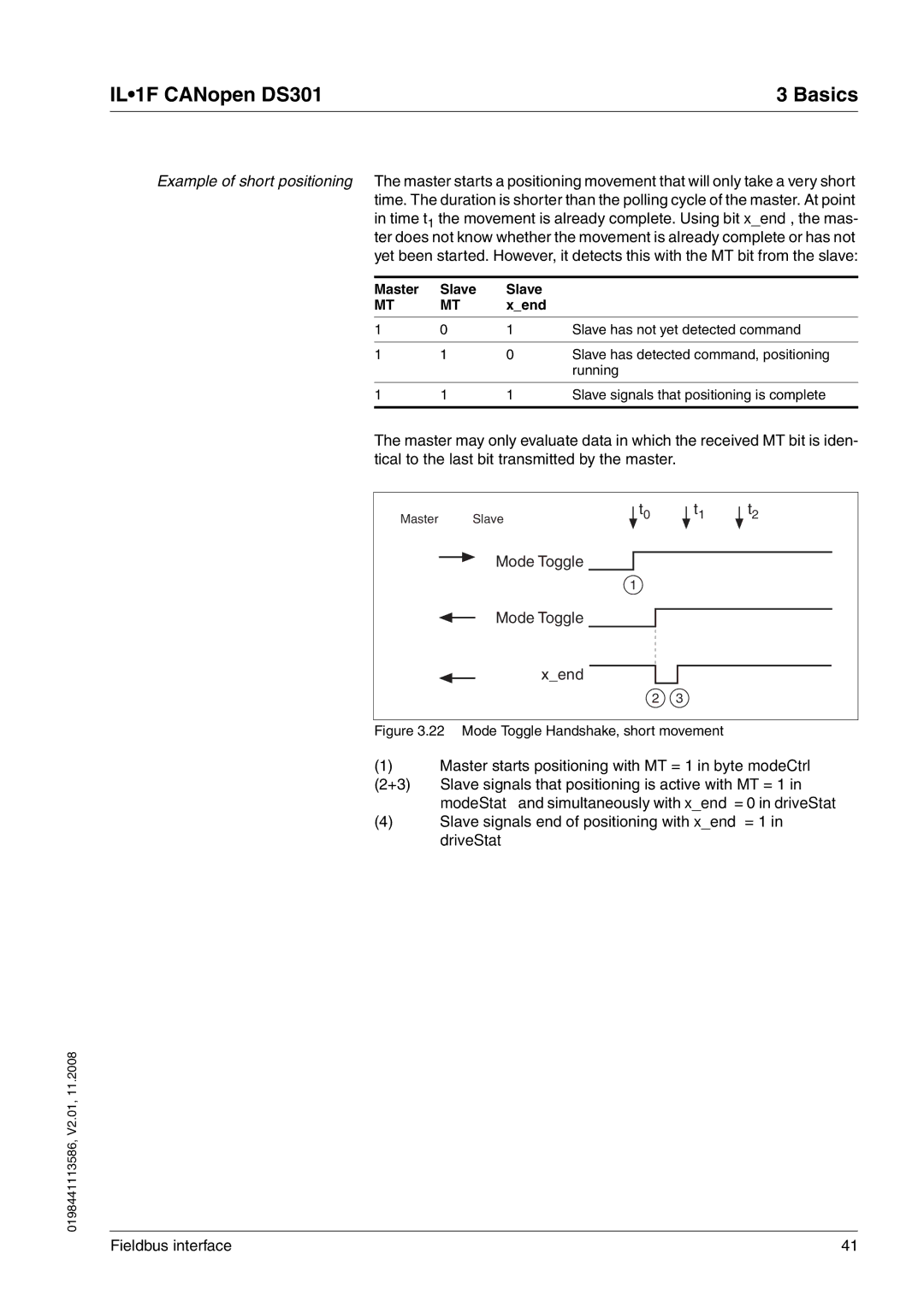
Figure 3.22 Mode Toggle Handshake, short movement
(1)Master starts positioning with MT = 1 in byte modeCtrl
(2+3) Slave signals that positioning is active with MT = 1 in
modeStat and simultaneously with x_end = 0 in driveStat
(4)Slave signals end of positioning with x_end = 1 in driveStat
0198441113586, V2.01, 11.2008
Fieldbus interface | 41 |