6 Operation | IL•1F CANopen DS301 |
6.5Error signaling via PDO4
6.5.1Synchronous errors
If a request for an operating mode sent via R_PDO4 cannot be proc- essed by the product, the product rejects processing and sets modeStat, bit 6 ("ModeError") in the T_PDO4. This does not interrupt the current process. To determine the cause of the error, the master can read the error number from the object CAN.modeError, 30:11 with an SDO access.
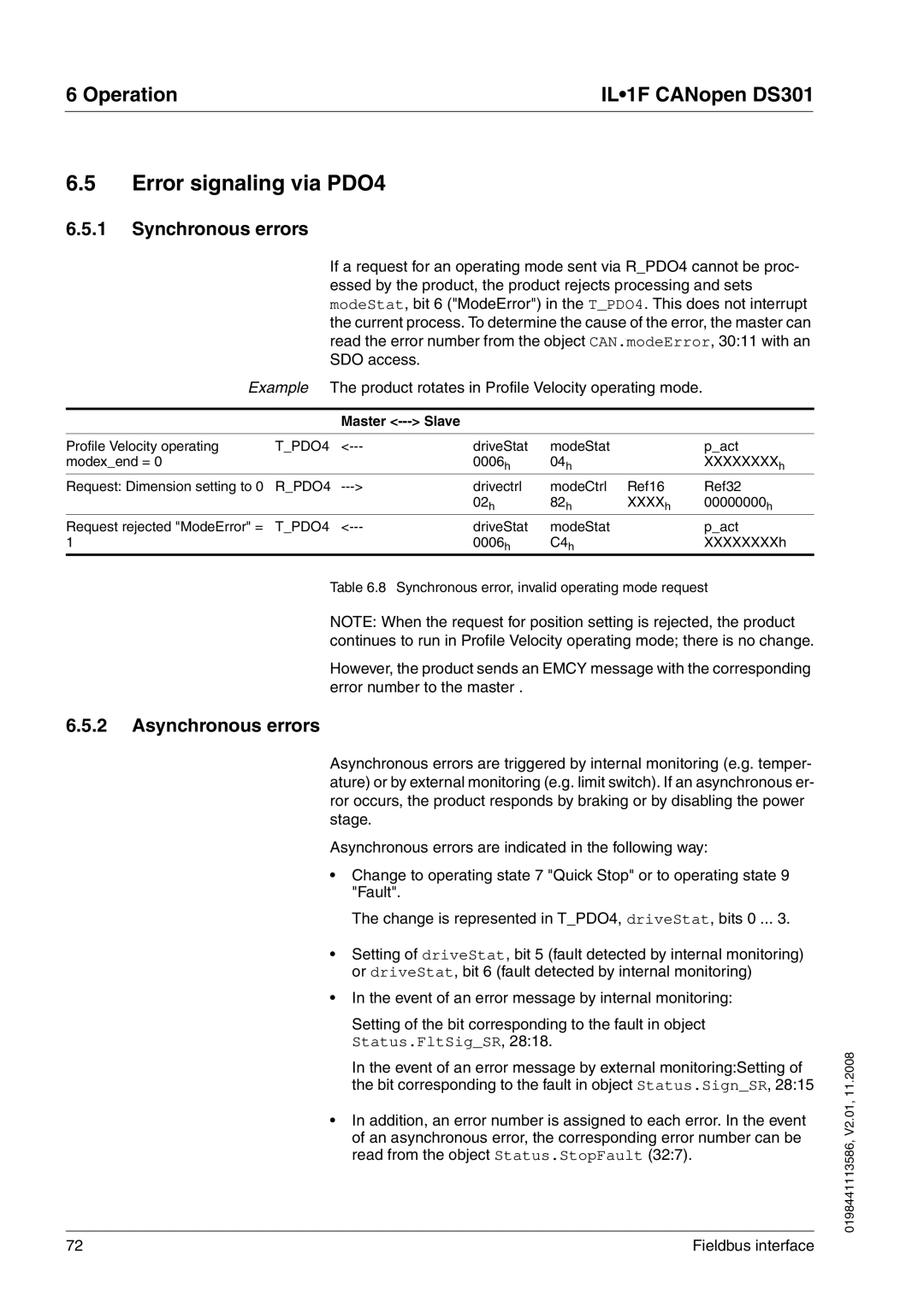
Example The product rotates in Profile Velocity operating mode.
|
| Master | > Slave |
|
|
|
Profile Velocity operating | T_PDO4 | driveStat | modeStat |
| p_act | |
modex_end = 0 |
|
| 0006h | 04h |
| XXXXXXXXh |
Request: Dimension setting to 0 | R_PDO4 | drivectrl | modeCtrl | Ref16 | Ref32 | |
|
|
| 02h | 82h | XXXXh | 00000000h |
Request rejected "ModeError" = | T_PDO4 | driveStat | modeStat |
| p_act | |
1 |
|
| 0006h | C4h |
| XXXXXXXXh |
Table 6.8 Synchronous error, invalid operating mode request
NOTE: When the request for position setting is rejected, the product continues to run in Profile Velocity operating mode; there is no change.
However, the product sends an EMCY message with the corresponding error number to the master .
6.5.2Asynchronous errors
Asynchronous errors are triggered by internal monitoring (e.g. temper- ature) or by external monitoring (e.g. limit switch). If an asynchronous er- ror occurs, the product responds by braking or by disabling the power stage.
Asynchronous errors are indicated in the following way:
•Change to operating state 7 "Quick Stop" or to operating state 9 "Fault".
The change is represented in T_PDO4, driveStat, bits 0 ... 3.
•Setting of driveStat, bit 5 (fault detected by internal monitoring) or driveStat, bit 6 (fault detected by internal monitoring)
•In the event of an error message by internal monitoring:
Setting of the bit corresponding to the fault in object
Status.FltSig_SR, 28:18.
In the event of an error message by external monitoring:Setting of the bit corresponding to the fault in object Status.Sign_SR, 28:15
•In addition, an error number is assigned to each error. In the event of an asynchronous error, the corresponding error number can be read from the object Status.StopFault (32:7).
0198441113586, V2.01, 11.2008
72 | Fieldbus interface |