Appendix C — Peer Cop Example
The Global Input Data from Node 6, starting with offset 1 for a length of
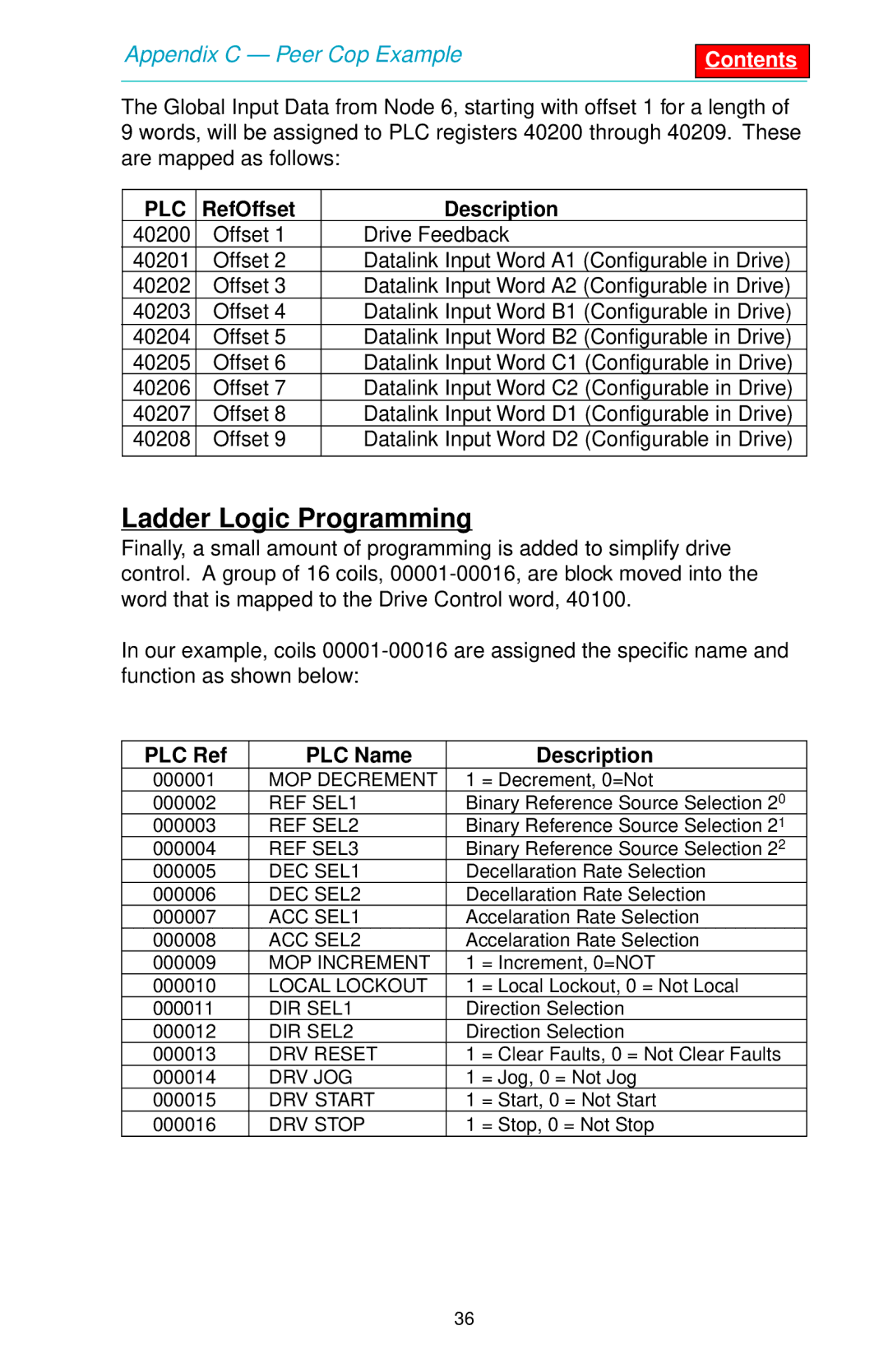
9 words, will be assigned to PLC registers 40200 through 40209. These are mapped as follows:
PLC | RefOffset | Description |
40200 | Offset 1 | Drive Feedback |
40201 | Offset 2 | Datalink Input Word A1 (Configurable in Drive) |
40202 | Offset 3 | Datalink Input Word A2 (Configurable in Drive) |
40203 | Offset 4 | Datalink Input Word B1 (Configurable in Drive) |
40204 | Offset 5 | Datalink Input Word B2 (Configurable in Drive) |
40205 | Offset 6 | Datalink Input Word C1 (Configurable in Drive) |
40206 | Offset 7 | Datalink Input Word C2 (Configurable in Drive) |
40207 | Offset 8 | Datalink Input Word D1 (Configurable in Drive) |
40208 | Offset 9 | Datalink Input Word D2 (Configurable in Drive) |
|
|
|
Ladder Logic Programming
Finally, a small amount of programming is added to simplify drive control. A group of 16 coils,
In our example, coils
PLC Ref | PLC Name |
| Description |
000001 | MOP DECREMENT | 1 | = Decrement, 0=Not |
000002 | REF SEL1 | Binary Reference Source Selection 20 | |
000003 | REF SEL2 | Binary Reference Source Selection 21 | |
000004 | REF SEL3 | Binary Reference Source Selection 22 | |
000005 | DEC SEL1 | Decellaration Rate Selection | |
000006 | DEC SEL2 | Decellaration Rate Selection | |
000007 | ACC SEL1 | Accelaration Rate Selection | |
000008 | ACC SEL2 | Accelaration Rate Selection | |
000009 | MOP INCREMENT | 1 | = Increment, 0=NOT |
000010 | LOCAL LOCKOUT | 1 | = Local Lockout, 0 = Not Local |
000011 | DIR SEL1 | Direction Selection | |
000012 | DIR SEL2 | Direction Selection | |
000013 | DRV RESET | 1 | = Clear Faults, 0 = Not Clear Faults |
000014 | DRV JOG | 1 | = Jog, 0 = Not Jog |
000015 | DRV START | 1 | = Start, 0 = Not Start |
000016 | DRV STOP | 1 | = Stop, 0 = Not Stop |
36