STE 58761
1.2MODE STRUCTURE
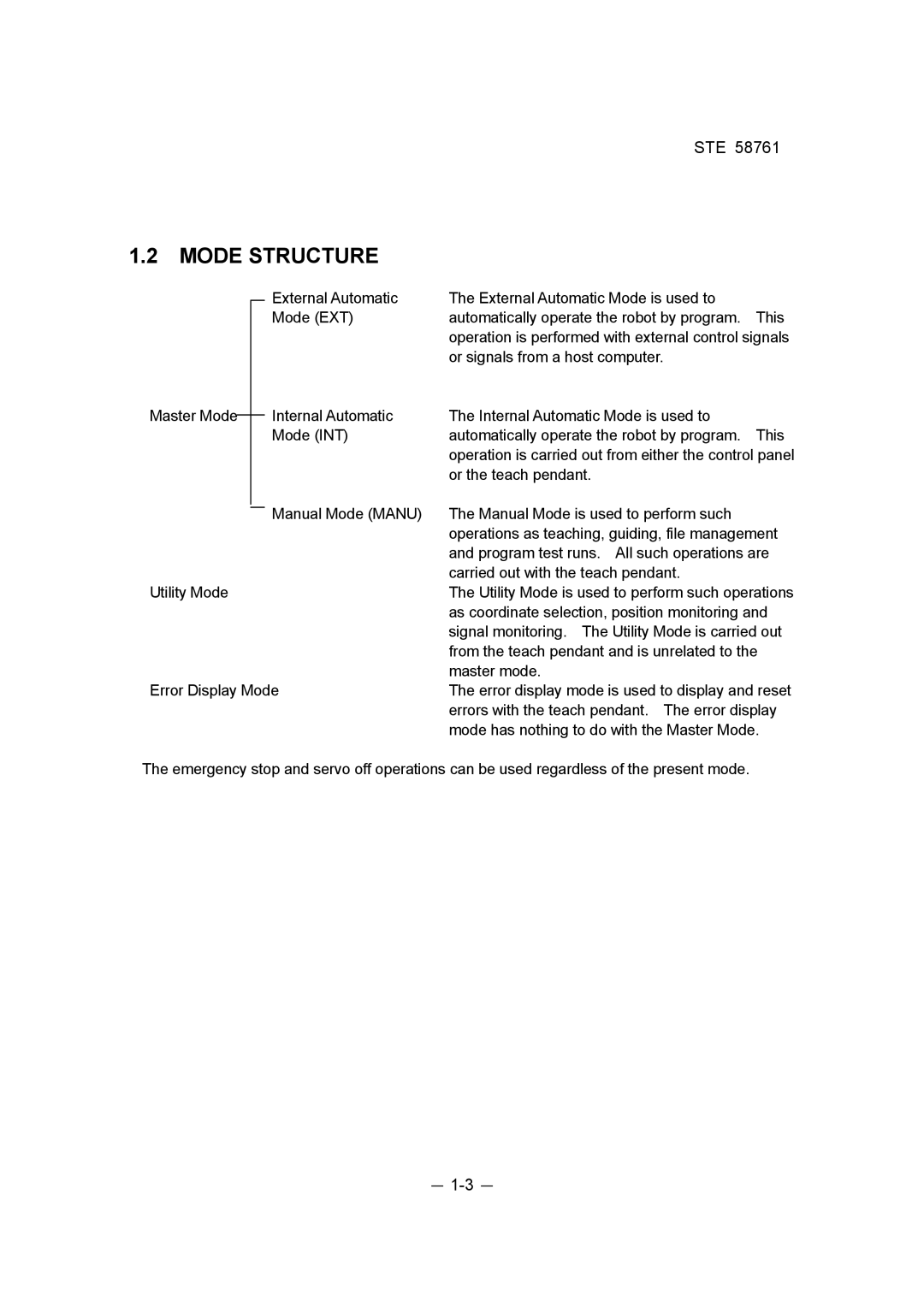
Master Mode
External Automatic | The External Automatic Mode is used to |
|
Mode (EXT) | automatically operate the robot by program. | This |
| operation is performed with external control signals | |
| or signals from a host computer. |
|
Internal Automatic | The Internal Automatic Mode is used to |
|
Mode (INT) | automatically operate the robot by program. | This |
| operation is carried out from either the control panel | |
| or the teach pendant. |
|
|
| Manual Mode (MANU) | The Manual Mode is used to perform such |
|
|
| operations as teaching, guiding, file management |
|
|
| and program test runs. All such operations are |
|
|
| carried out with the teach pendant. |
Utility Mode | The Utility Mode is used to perform such operations | ||
|
|
| as coordinate selection, position monitoring and |
|
|
| signal monitoring. The Utility Mode is carried out |
|
|
| from the teach pendant and is unrelated to the |
|
|
| master mode. |
Error Display Mode | The error display mode is used to display and reset | ||
|
|
| errors with the teach pendant. The error display |
|
|
| mode has nothing to do with the Master Mode. |
The emergency stop and servo off operations can be used regardless of the present mode.
-