To select Encoder On/Off, type the Command Key 'E'. This parameter specifies if Encoder Correction is to be Enabled or Disabled. A '1' will Enable Encoder Correction, a '0' will Disable it. The Indexer will do all the appropriate corrections needed when the Finish Move (F) command is executed. The default value for this is 0, or no encoder correction.
ENCODER RESOLUTION (any number)
To select Encoder Resolution, type the Command Key 'Z'. This parameter specifies how many 'lines' the Encoder has. The default value for this is 400 lines.
ENCODER RETRIES (any real number)
To select Encoder Retries, type the Command Key 'V'. This parameter specifies how many times the CLCI2000 will try to obtain the correct position. For a value set at 1, the CLCI2000 will move the correct distance, and then retry once if the encoder value does not match the number of steps the motor was supposed to take. When the CLCI2000 does a retry, it will always retry the move at the Base Speed. The default value for Encoder Retries is 0.
ENCODER WINDOW (any integer)
To select Encoder Window, type the Command Key 'Y'. This is the allowable error the encoder might have at the end of a move without correcting. The units for this is in Quadrature Pulses. For a 400 line encoder, there will be 1600 quadrature pulses per one revolution. The default value for this is 20.
FINISH MOVE (no value)
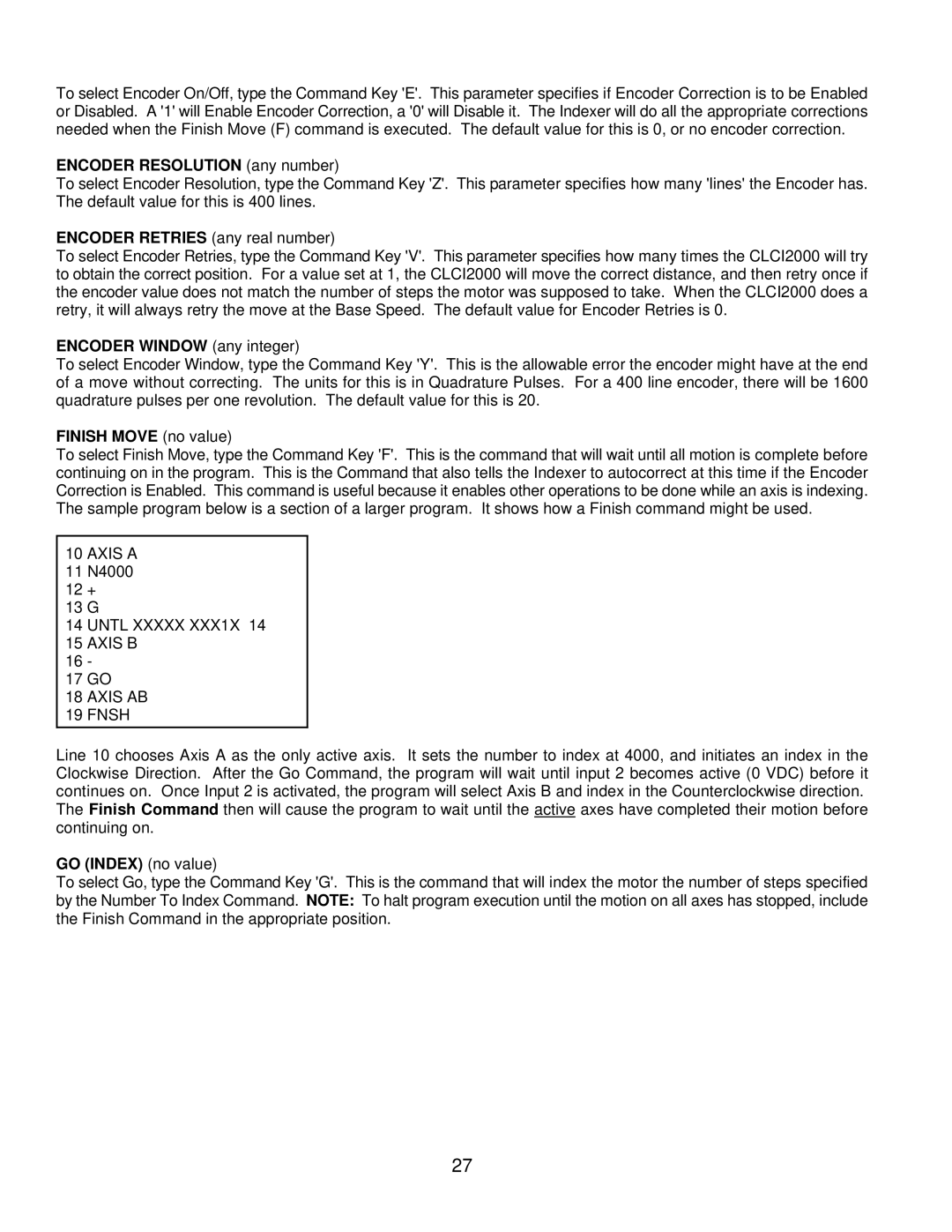
To select Finish Move, type the Command Key 'F'. This is the command that will wait until all motion is complete before continuing on in the program. This is the Command that also tells the Indexer to autocorrect at this time if the Encoder Correction is Enabled. This command is useful because it enables other operations to be done while an axis is indexing. The sample program below is a section of a larger program. It shows how a Finish command might be used.
10 AXIS A
11N4000
12+
13G
14UNTL XXXXX XXX1X 14
15AXIS B
16-
17GO
18AXIS AB
19FNSH
Line 10 chooses Axis A as the only active axis. It sets the number to index at 4000, and initiates an index in the Clockwise Direction. After the Go Command, the program will wait until input 2 becomes active (0 VDC) before it continues on. Once Input 2 is activated, the program will select Axis B and index in the Counterclockwise direction. The Finish Command then will cause the program to wait until the active axes have completed their motion before continuing on.
GO (INDEX) (no value)
To select Go, type the Command Key 'G'. This is the command that will index the motor the number of steps specified by the Number To Index Command. NOTE: To halt program execution until the motion on all axes has stopped, include the Finish Command in the appropriate position.
27