1601-0165-A6
LM10 Motor Protection System Instruction Manual
GE Consumer & Industrial
Multilin
2008 GE Multilin Incorporated. All rights reserved
3 INTERFACE
Table of Contents
2 INSTALLATION
1 INTRODUCTION
APPENDIX
4 FUNCTIONALITY
5 COMMUNICATIONS
6 MISCELLANEOUS
A-17
INDEX
1-IV
1.1.1 The LM10 Relay
LM10 Motor Protection System Chapter 1 Introduction
1.1 Description
1.2.3 Relay Outputs
1.2.1 Features
1.2 Overview
1.2.2 Current and Voltage Inputs
FIGURE 1-1 Functional Block Diagram
1.2.4 Power Supply
1.2.5 Block Diagram
1.3.1 Programming and Display Unit
1.3 Features
1.3.2 LED Indicators
1.3.3 Switches
Baud Rate
Changes to switch settings will not take effect until power is cycled
DIP Switch Position
FIGURE 1-2 LM10 Features
LM10
1.4 Ordering
1.4.1 Order Codes
Table 1-1 LM10 Order Codes
1.5.1 Protection Elements
Specifications
GROUND FAULT
PHASE CURRENT
1.5.3 Control Functions
POWER
POWER FACTOR
POWER SUPPLY
200 to
CONTACT INPUT
Stop, Reset, DeviceNet control
0 to 120
1.5.6 Outputs
1.5.5 CT Dimensions
Ground fault CT
Thermal overload CT
1.5.8
Environmental
Approvals/Certification
SERIAL COMMUNICATIONS
1-12
2.1.2 RS232 Port
LM10 Motor Protection System Chapter 2 Installation
2.1 Wiring
2.1.1 DeviceNet
Table 2-1 Control Connections
2.1.3 Control Terminals
2.1.4 Sensor Pack Input
2.1.5 Wiring Diagram
CHAPTER 2 INSTALLATION
FIGURE 2-4 LM10 Wiring Diagram
2.2.1 LM10 Mounting
2.2 Mounting
FIGURE 2-7 PDU Door-mount Dimensions
2.2.2 PDU Door Mount
FIGURE 2-6 LM10 Backplate Dimensions
3.1.2 LEDs
LM10 Motor Protection System Chapter 3 Interface
3.1 PDU Operations
3.1.1 Liquid Crystal Display
power factor, kW, average current, and current unbalance. Pressing the History button again advances to the next history record
3.2.2 History Record and Status Screens
3.2.3 Configuration Menu
3.2 PDU Screens and Menus
3.2.1 Main Startup Screen
Run 2 to Run 1 delay between forward and reverse or between speeds
3.3.2 Functional Details
3.3 EnerVista LM10 Software
3.3.1 Description
Table 3-1 EnerVista Hot Keys
4.1.1 Descriptions
4.1 Overcurrent Fault Conditions
LM10 Motor Protection System Chapter 4 Functionality
CHAPTER 4 FUNCTIONALITY
FIGURE 4-1 Cold Motor Trip Curves FIGURE 4-2 Hot Motor Trip Curves
FIGURE 4-4 Cool Down Times
4.1.2 Trip Curves Example
FIGURE 4-3 Trip Curve with Jam and Stall Enabled
Page
Table 4-1 LM10 Programmable Parameters
4.2 Configuration Settings
4.2.1 Overview
4-30
4.2.2 Main Menu
CONFIGURATION SETTINGSCHAPTER 4 FUNCTIONALITY
4.2.4 CTs and CPTs
PATH Configuration Ø ENGLISH/SPANISH
PATH Configuration ØØ CTs & CPTs
4.2.3 Language
4.2.5 Starter Type
4.2.6 Run 1 and Run 2 Setup
PATH Configuration ØØØ Starter Type
PATH Configuration ØØØØ Run 1 Setup
Δ = phase current - average current
4.2.7 Time Delays
4.2.8 Other Settings
PATH Configuration ØØØØØ Time Delays
PATH Configuration ØØØØØØ Other Settings
Auto Restart off
DevNet Fault on
Reset Run Hrs
Maintained off
PATH Configuration ØØØØØØØ Aux Relay Faults
4.2.9 Auxiliary Relay Faults
PATH Configuration ØØØØØØØØ Aux Relay Faults
4.2.10 Passcode and Login
4.2.11 Run Operations
4.2.12 Factory Default
PATH Configuration ØØØØØØØØØ Run Operations
PATH Configuration ØØØØØØØØØØ Factory Default
Range
4.3 Status Values
4.3.1 Main Menu
Run, Fault
This value can be reset via the Reset Run Hrs configuration setting
Fault, Dev Stop, Voltage, Aux Sense Range 0.0 to 3200.0 A
4.4 History Values
4.4.1 Last Trip Data
Range Overcurrent, Gr. Fault, Jam, Stall CuUnbalance, LdLoss, DevNet
Motor Stop
AUX Sense 1 Fault
4.5 Motor Start/Stop Logic
Motor Status Running
RUN1 PDU Command
Motor RUN Commands
Motor STOP Commands
RUN1 Switch Input
4-44
5.1.2 Poll Data
LM10 Motor Protection System Chapter 5 Communications
5.1 DeviceNet Operations
5.1.1 Description
Table 5-4 Poll Data Group
Table 5-1 Poll Data Group
Table 5-2 Poll Data Group
Table 5-3 Poll Data Group
UINT = 16 bit unsigned integer
5.1.3 Identity object
5.1.4 Message Router
5.1.5 DeviceNet Object
Device outputs see format and mapping below
5.1.6 Assembly Object
Baud Rate, value 0 to 2 125, 250, and 500 kbps
Assembly Object, Class Code 4, Instance
CHAPTER 5 COMMUNICATIONS
Data Formats for Device Inputs
see below
Assembly Object, Class Code 4, Instance
Connection Object, Class Code 5, Attributes
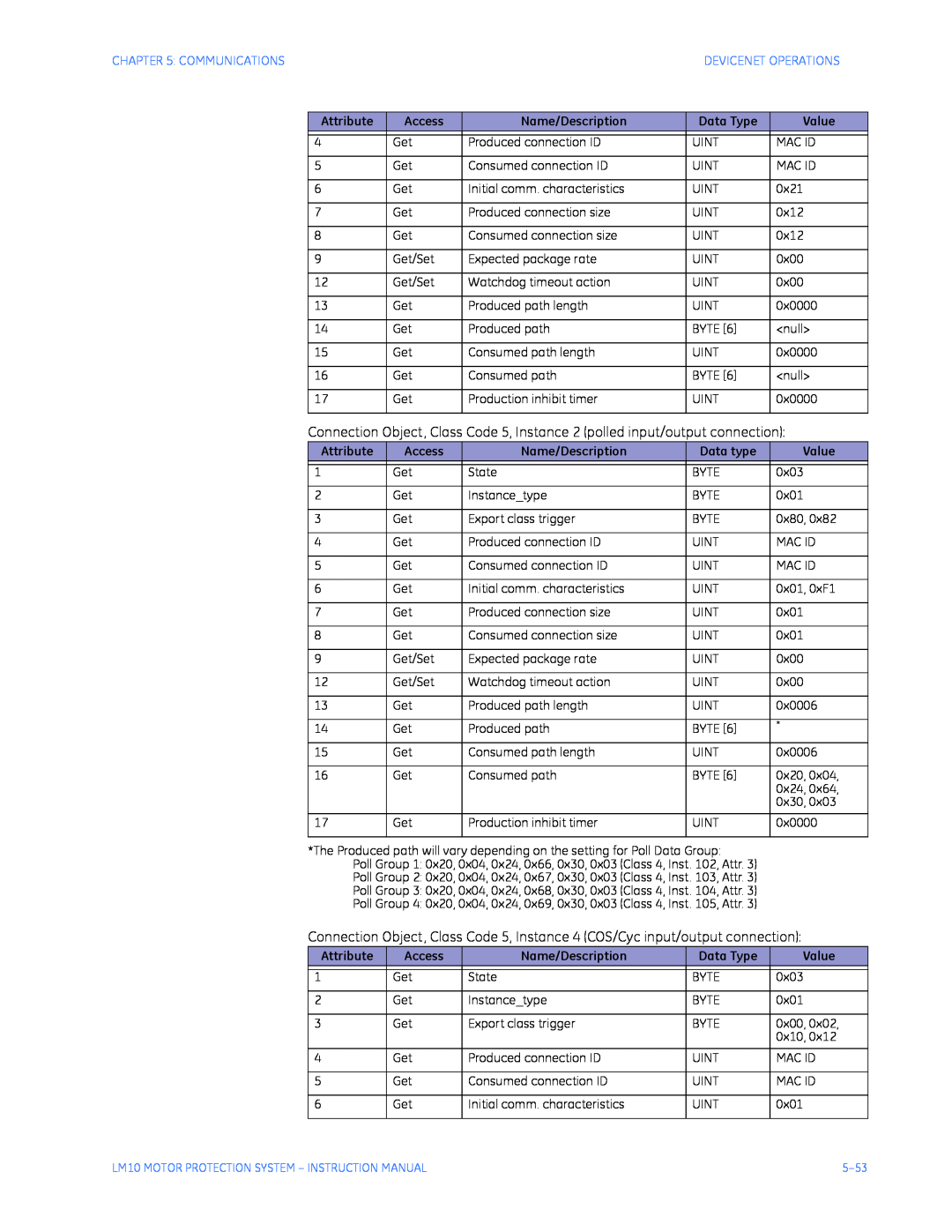
5.1.7 Connection Object
Connection Object, Class Code 5, Services
Connection Object, Class Code 5, Instance 2 polled input/output connection
USINT = 8-bit unsigned integer UINT = 16-bit unsigned integer
5.1.8 ACK Handler Object
5.1.9 Overload Object
UINT = 16-bit unsigned integer
5.1.10 Extension Object
Data Type
F1 Full Load Current 16-bit unsigned integer
F2 Ground Fault
F7 Power Transformer
5.1.11 Data Formats
F12 Starter Type
F11 Auxiliary Relay Faults 16-bit bitmask
F9 Auxiliary Sense 1 / Run1-Run2 Time Delays
F10 Auxiliary Sense 2 / Run2-Run1 Time Delays
F17 Trip Class
F14 Other Settings 16-bit Bitmask
F15 Poll Data Group enumeration 16-bit unsigned integer
F16 Run1-Run2 and Run2-Run1 Time Delay 16-bit unsigned integer
F24 Status Word 16-bit bitmask
F21 Motor Status 8-bit Bitmask
F22 Motor Status 16-bit bitmask
F23 16-bit Unsigned Integer
5.1.12 Special Application
F25 Input Switch Status 16-bit value use only lower byte
Sent by scanner CANID, MACID, 0x0E, 0x64, 0x01
5.2.1 Description
5.2 Serial Port
5-64
6.1.2 Changes to the Manual
LM10 Motor Protection System Chapter 6 Miscellaneous
Revision History
6.1.1 Release Dates
Changes to Connection Object, Class Code 5, Instance 2 polled
Table 6-4 Changes to Manual Since Release A3
Change to Assembly Object, Class Code 4, Instance 101, Attribute
Add Assembly Object, Class Code 4, Instance 105 Poll Data Group
6.2.1 GE Multilin Warranty
6.2 Warranty
CHAPTER 6 MISCELLANEOUS
WARRANTY
6-68
A.1.1 Description
LM10 Motor Protection System Appendix A
A.1 DeviceNet Overview
A.1.3 DeviceNet Operations
A.1.2 Controller Area Network CAN
A.1.7 Maximum Cable Lengths for DeviceNet
A.1.6 DeviceNet Features
A.1.4 Explicit Messaging and Input/Output I/O Messaging
A.1.5 Pre-defined Master/Slave Connection Set
Description
A.1.8 DeviceNet Specification Highlights
Table A-1 Trunk Cable Length Specification
Table A-2 Drop Cable Length Specification
Device Profiles
The Object Model
A.2.1 Overview
A.2.3 Network Configuration
A.2.4 Configuration Procedure
A.2 LM10 and GE Fanuc 90-30 with DeviceNet
Z Also, set the Scan Interval and Reconnect Time
A.2.5 Polling Input/Output Connection
Z Select GE LM10 under GE Multilin
Page
Phase A values are displayed in %I00105 223 ⋅ 0.1 amps
A.2.7 Cyclic Input/Output Connection
A.2.6 COS Change of State Input/Output Connection
Monitoring Data
A.2.8 Explicit Messaging
Rung 3 has a Block Move word, 3 blocks
FIGURE A-1 Ladder Logic for Data Monitoring
Login Configuration Level to the LM10
FIGURE A-2 Ladder Logic for Login Configuration
Making Setting Changes
FIGURE A-3 Ladder Logic for Setting Changes
Login User Level to the LM10
FIGURE A-4 Ladder Logic for Login User
A.3.1 Description
A.3.2 System Setup
A.3.4 Setting Up the DeviceNet Network
A.3 LM10 and Allen-Bradley SLC500 via DeviceNet
A.3.5 Changing the Mode of Operation
A.3.6 Configuring the Slave Device
A.3.7 Control and Monitoring of the LM10
A.3.8 Explicit Messaging with the LM10 Relay
Table A-4 Data Table Layout
Table A-3 Status Codes Provided by ODVA Specification
A.3.9 Data Table Layout
Table A-6 Data for Explicit Message Response, M1 Transferred to N20
A.3.10 Ladder Logic
Table A-5 Data to Get Trip Class
Instance, and Attribute
Table A-7 Data to Get Motor Run Time
Table A-8 Data for Explicit Message Response, M1 Transferred to N20
A-25
FIGURE A-9 Ladder Logic, Rungs 0000 to
A-26
FIGURE A-10 Ladder Logic, Rungs 0006 to
A-27
FIGURE A-11 Ladder Logic, Rungs 0009 to
A-28
Index
Page
LM10 MOTOR PROTECTION SYSTEM - INSTRUCTION MANUAL
LM10 MOTOR PROTECTION SYSTEM - INSTRUCTION MANUAL
INDEX