EXCEL 10 W7761A INPUT/OUTPUT DEVICE
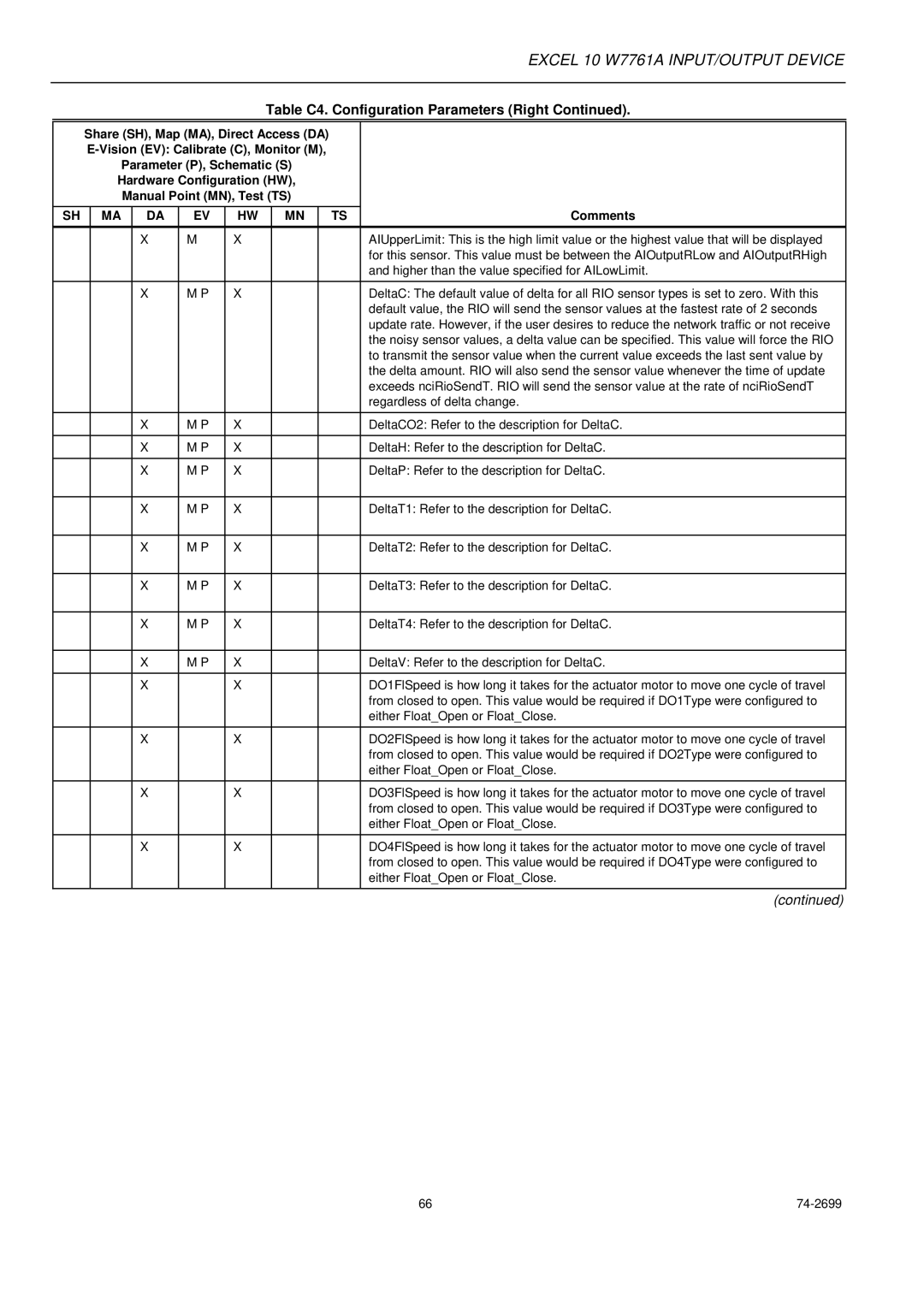
Table C4. Configuration Parameters (Right Continued).
Share (SH), Map (MA), Direct Access (DA) |
|
| |||||||
|
| ||||||||
|
| Parameter (P), Schematic (S) |
|
| |||||
| Hardware Configuration (HW), |
|
| ||||||
|
| Manual Point (MN), Test (TS) |
|
| |||||
|
|
|
|
|
|
|
|
|
|
SH | MA |
| DA | EV | HW | MN |
| TS | Comments |
|
|
|
|
|
|
|
|
|
|
|
|
| X | M | X |
|
|
| AIUpperLimit: This is the high limit value or the highest value that will be displayed |
|
|
|
|
|
|
|
|
| for this sensor. This value must be between the AIOutputRLow and AIOutputRHigh |
|
|
|
|
|
|
|
|
| and higher than the value specified for AILowLimit. |
|
|
|
|
|
|
|
|
|
|
|
|
| X | M P | X |
|
|
| DeltaC: The default value of delta for all RIO sensor types is set to zero. With this |
|
|
|
|
|
|
|
|
| default value, the RIO will send the sensor values at the fastest rate of 2 seconds |
|
|
|
|
|
|
|
|
| update rate. However, if the user desires to reduce the network traffic or not receive |
|
|
|
|
|
|
|
|
| the noisy sensor values, a delta value can be specified. This value will force the RIO |
|
|
|
|
|
|
|
|
| to transmit the sensor value when the current value exceeds the last sent value by |
|
|
|
|
|
|
|
|
| the delta amount. RIO will also send the sensor value whenever the time of update |
|
|
|
|
|
|
|
|
| exceeds nciRioSendT. RIO will send the sensor value at the rate of nciRioSendT |
|
|
|
|
|
|
|
|
| regardless of delta change. |
|
|
|
|
|
|
|
|
|
|
|
|
| X | M P | X |
|
|
| DeltaCO2: Refer to the description for DeltaC. |
|
|
|
|
|
|
|
|
|
|
|
|
| X | M P | X |
|
|
| DeltaH: Refer to the description for DeltaC. |
|
|
|
|
|
|
|
|
|
|
|
|
| X | M P | X |
|
|
| DeltaP: Refer to the description for DeltaC. |
|
|
|
|
|
|
|
|
|
|
|
|
| X | M P | X |
|
|
| DeltaT1: Refer to the description for DeltaC. |
|
|
|
|
|
|
|
|
|
|
|
|
| X | M P | X |
|
|
| DeltaT2: Refer to the description for DeltaC. |
|
|
|
|
|
|
|
|
|
|
|
|
| X | M P | X |
|
|
| DeltaT3: Refer to the description for DeltaC. |
|
|
|
|
|
|
|
|
|
|
|
|
| X | M P | X |
|
|
| DeltaT4: Refer to the description for DeltaC. |
|
|
|
|
|
|
|
|
|
|
|
|
| X | M P | X |
|
|
| DeltaV: Refer to the description for DeltaC. |
|
|
|
|
|
|
|
|
|
|
|
|
| X |
| X |
|
|
| DO1FlSpeed is how long it takes for the actuator motor to move one cycle of travel |
|
|
|
|
|
|
|
|
| from closed to open. This value would be required if DO1Type were configured to |
|
|
|
|
|
|
|
|
| either Float_Open or Float_Close. |
|
|
|
|
|
|
|
|
|
|
|
|
| X |
| X |
|
|
| DO2FlSpeed is how long it takes for the actuator motor to move one cycle of travel |
|
|
|
|
|
|
|
|
| from closed to open. This value would be required if DO2Type were configured to |
|
|
|
|
|
|
|
|
| either Float_Open or Float_Close. |
|
|
|
|
|
|
|
|
|
|
|
|
| X |
| X |
|
|
| DO3FlSpeed is how long it takes for the actuator motor to move one cycle of travel |
|
|
|
|
|
|
|
|
| from closed to open. This value would be required if DO3Type were configured to |
|
|
|
|
|
|
|
|
| either Float_Open or Float_Close. |
|
|
|
|
|
|
|
|
|
|
|
|
| X |
| X |
|
|
| DO4FlSpeed is how long it takes for the actuator motor to move one cycle of travel |
|
|
|
|
|
|
|
|
| from closed to open. This value would be required if DO4Type were configured to |
|
|
|
|
|
|
|
|
| either Float_Open or Float_Close. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| (continued) |
66 |