EXCEL 10 W7761A INPUT/OUTPUT DEVICE
Table C4. Configuration Parameters (Right Continued).
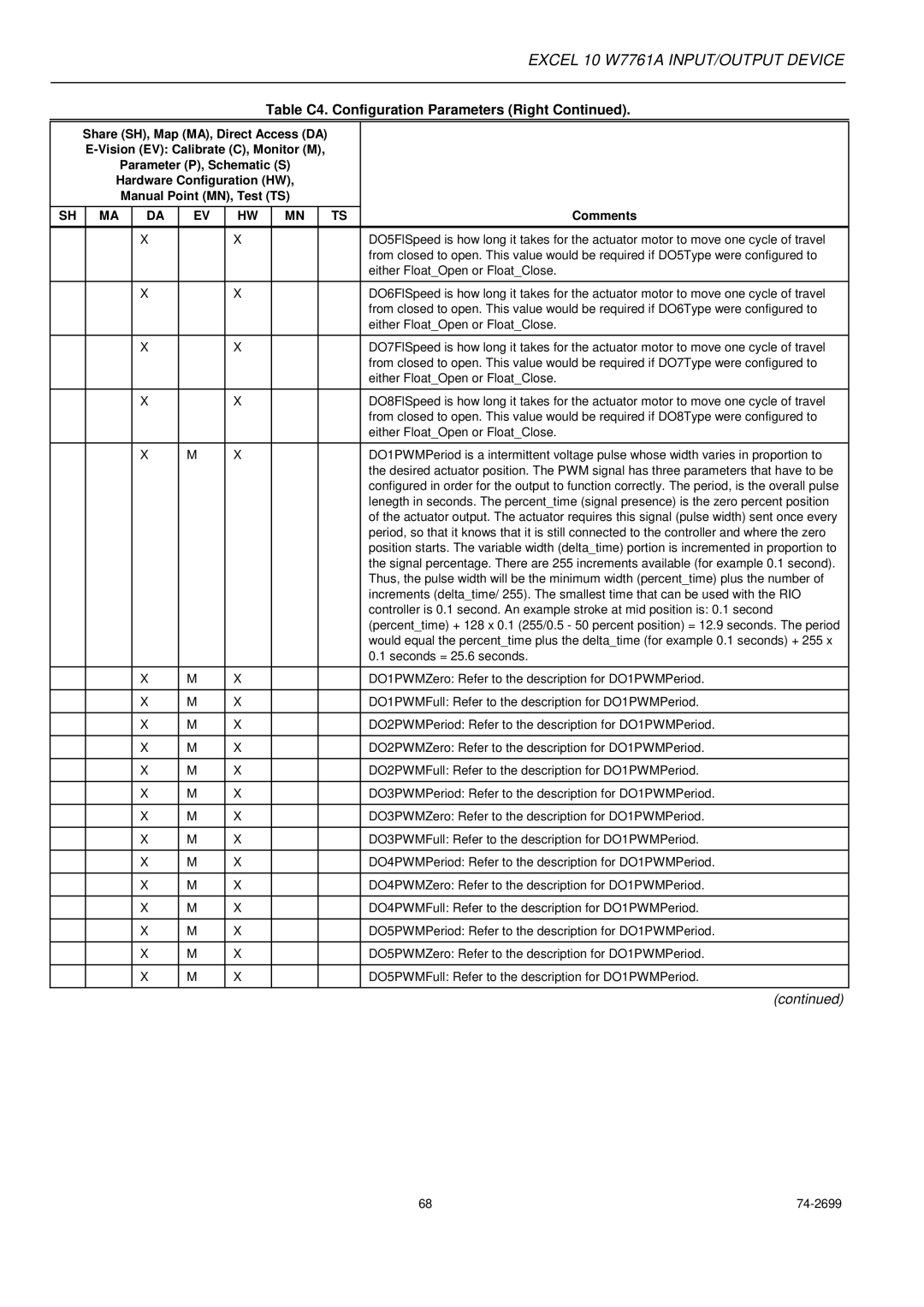
| Share (SH), Map (MA), Direct Access (DA) |
|
| |||||||
|
|
|
| |||||||
|
|
| Parameter (P), Schematic (S) |
|
| |||||
|
| Hardware Configuration (HW), |
|
| ||||||
|
|
| Manual Point (MN), Test (TS) |
|
| |||||
|
|
|
|
|
|
|
|
|
|
|
SH |
| MA |
| DA | EV | HW | MN |
| TS | Comments |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| X |
| X |
|
|
| DO5FlSpeed is how long it takes for the actuator motor to move one cycle of travel |
|
|
|
|
|
|
|
|
|
| from closed to open. This value would be required if DO5Type were configured to |
|
|
|
|
|
|
|
|
|
| either Float_Open or Float_Close. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| X |
| X |
|
|
| DO6FlSpeed is how long it takes for the actuator motor to move one cycle of travel |
|
|
|
|
|
|
|
|
|
| from closed to open. This value would be required if DO6Type were configured to |
|
|
|
|
|
|
|
|
|
| either Float_Open or Float_Close. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| X |
| X |
|
|
| DO7FlSpeed is how long it takes for the actuator motor to move one cycle of travel |
|
|
|
|
|
|
|
|
|
| from closed to open. This value would be required if DO7Type were configured to |
|
|
|
|
|
|
|
|
|
| either Float_Open or Float_Close. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| X |
| X |
|
|
| DO8FlSpeed is how long it takes for the actuator motor to move one cycle of travel |
|
|
|
|
|
|
|
|
|
| from closed to open. This value would be required if DO8Type were configured to |
|
|
|
|
|
|
|
|
|
| either Float_Open or Float_Close. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| X | M | X |
|
|
| DO1PWMPeriod is a intermittent voltage pulse whose width varies in proportion to |
|
|
|
|
|
|
|
|
|
| the desired actuator position. The PWM signal has three parameters that have to be |
|
|
|
|
|
|
|
|
|
| configured in order for the output to function correctly. The period, is the overall pulse |
|
|
|
|
|
|
|
|
|
| lenegth in seconds. The percent_time (signal presence) is the zero percent position |
|
|
|
|
|
|
|
|
|
| of the actuator output. The actuator requires this signal (pulse width) sent once every |
|
|
|
|
|
|
|
|
|
| period, so that it knows that it is still connected to the controller and where the zero |
|
|
|
|
|
|
|
|
|
| position starts. The variable width (delta_time) portion is incremented in proportion to |
|
|
|
|
|
|
|
|
|
| the signal percentage. There are 255 increments available (for example 0.1 second). |
|
|
|
|
|
|
|
|
|
| Thus, the pulse width will be the minimum width (percent_time) plus the number of |
|
|
|
|
|
|
|
|
|
| increments (delta_time/ 255). The smallest time that can be used with the RIO |
|
|
|
|
|
|
|
|
|
| controller is 0.1 second. An example stroke at mid position is: 0.1 second |
|
|
|
|
|
|
|
|
|
| (percent_time) + 128 x 0.1 (255/0.5 - 50 percent position) = 12.9 seconds. The period |
|
|
|
|
|
|
|
|
|
| would equal the percent_time plus the delta_time (for example 0.1 seconds) + 255 x |
|
|
|
|
|
|
|
|
|
| 0.1 seconds = 25.6 seconds. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| X | M | X |
|
|
| DO1PWMZero: Refer to the description for DO1PWMPeriod. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| X | M | X |
|
|
| DO1PWMFull: Refer to the description for DO1PWMPeriod. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| X | M | X |
|
|
| DO2PWMPeriod: Refer to the description for DO1PWMPeriod. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| X | M | X |
|
|
| DO2PWMZero: Refer to the description for DO1PWMPeriod. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| X | M | X |
|
|
| DO2PWMFull: Refer to the description for DO1PWMPeriod. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| X | M | X |
|
|
| DO3PWMPeriod: Refer to the description for DO1PWMPeriod. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| X | M | X |
|
|
| DO3PWMZero: Refer to the description for DO1PWMPeriod. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| X | M | X |
|
|
| DO3PWMFull: Refer to the description for DO1PWMPeriod. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| X | M | X |
|
|
| DO4PWMPeriod: Refer to the description for DO1PWMPeriod. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| X | M | X |
|
|
| DO4PWMZero: Refer to the description for DO1PWMPeriod. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| X | M | X |
|
|
| DO4PWMFull: Refer to the description for DO1PWMPeriod. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| X | M | X |
|
|
| DO5PWMPeriod: Refer to the description for DO1PWMPeriod. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| X | M | X |
|
|
| DO5PWMZero: Refer to the description for DO1PWMPeriod. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| X | M | X |
|
|
| DO5PWMFull: Refer to the description for DO1PWMPeriod. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| (continued) |
68 |