3-5. Selecting A Location
Movement
2
OR
1
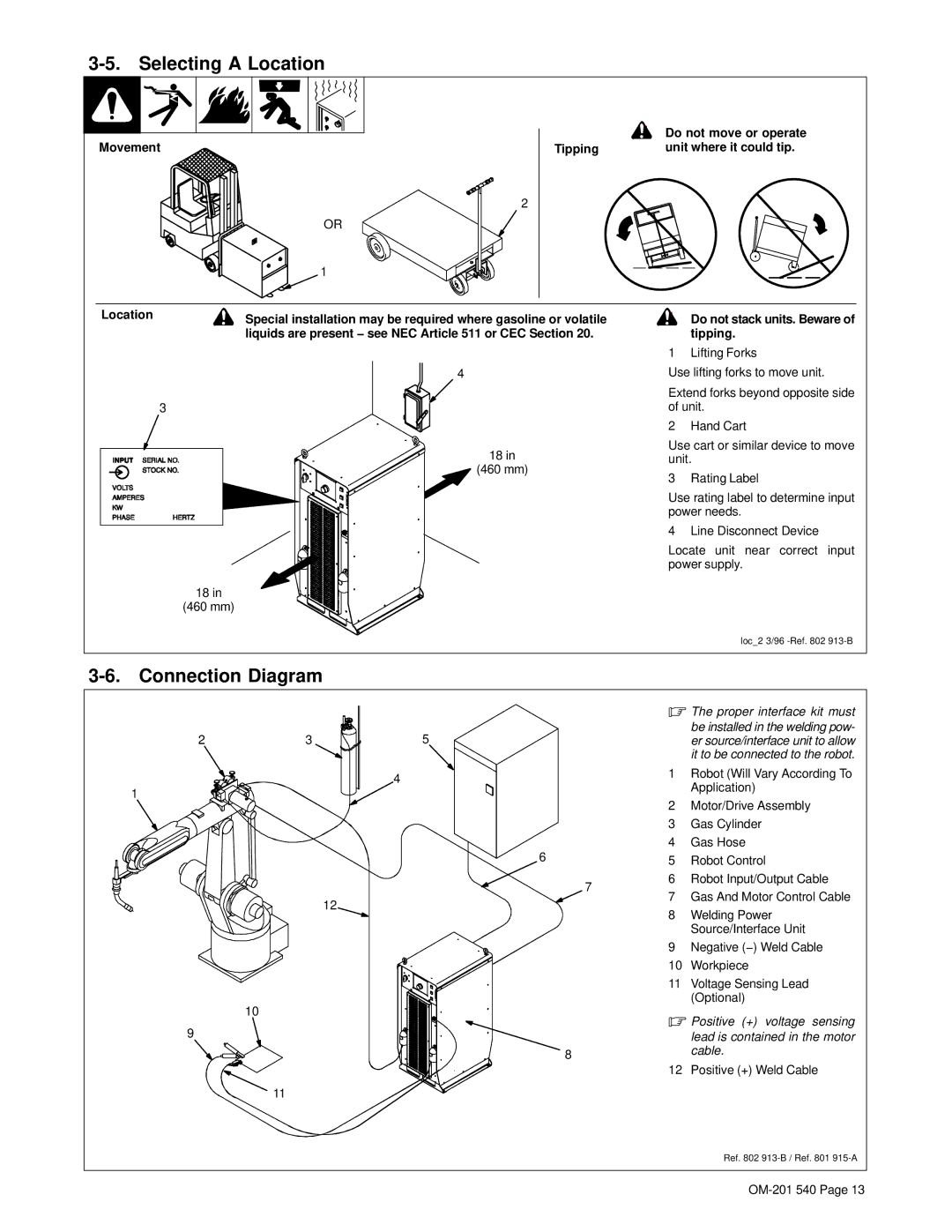
| ! Do not move or operate |
Tipping | unit where it could tip. |
Location | ! Special installation may be required where gasoline or volatile |
| liquids are present − see NEC Article 511 or CEC Section 20. |
| 4 |
| 3 |
| 18 in |
| (460 mm) |
18 in
(460 mm)
 ! Do not stack units. Beware of tipping.
! Do not stack units. Beware of tipping.
1 Lifting Forks
Use lifting forks to move unit.
Extend forks beyond opposite side of unit.
2 Hand Cart
Use cart or similar device to move unit.
3 Rating Label
Use rating label to determine input power needs.
4 Line Disconnect Device
Locate unit near correct input power supply.
loc_2 3/96
3-6. Connection Diagram
23
1
12
10
9
11
5
4
6
7
8
.The proper interface kit must be installed in the welding pow- er source/interface unit to allow it to be connected to the robot.
1Robot (Will Vary According To Application)
2Motor/Drive Assembly
3Gas Cylinder
4Gas Hose
5Robot Control
6Robot Input/Output Cable
7Gas And Motor Control Cable
8Welding Power Source/Interface Unit
9Negative (−) Weld Cable
10Workpiece
11Voltage Sensing Lead (Optional)
.Positive (+) voltage sensing lead is contained in the motor cable.
12 Positive (+) Weld Cable
Ref. 802