SPECIFICATIONS
6.1.2Common specifications
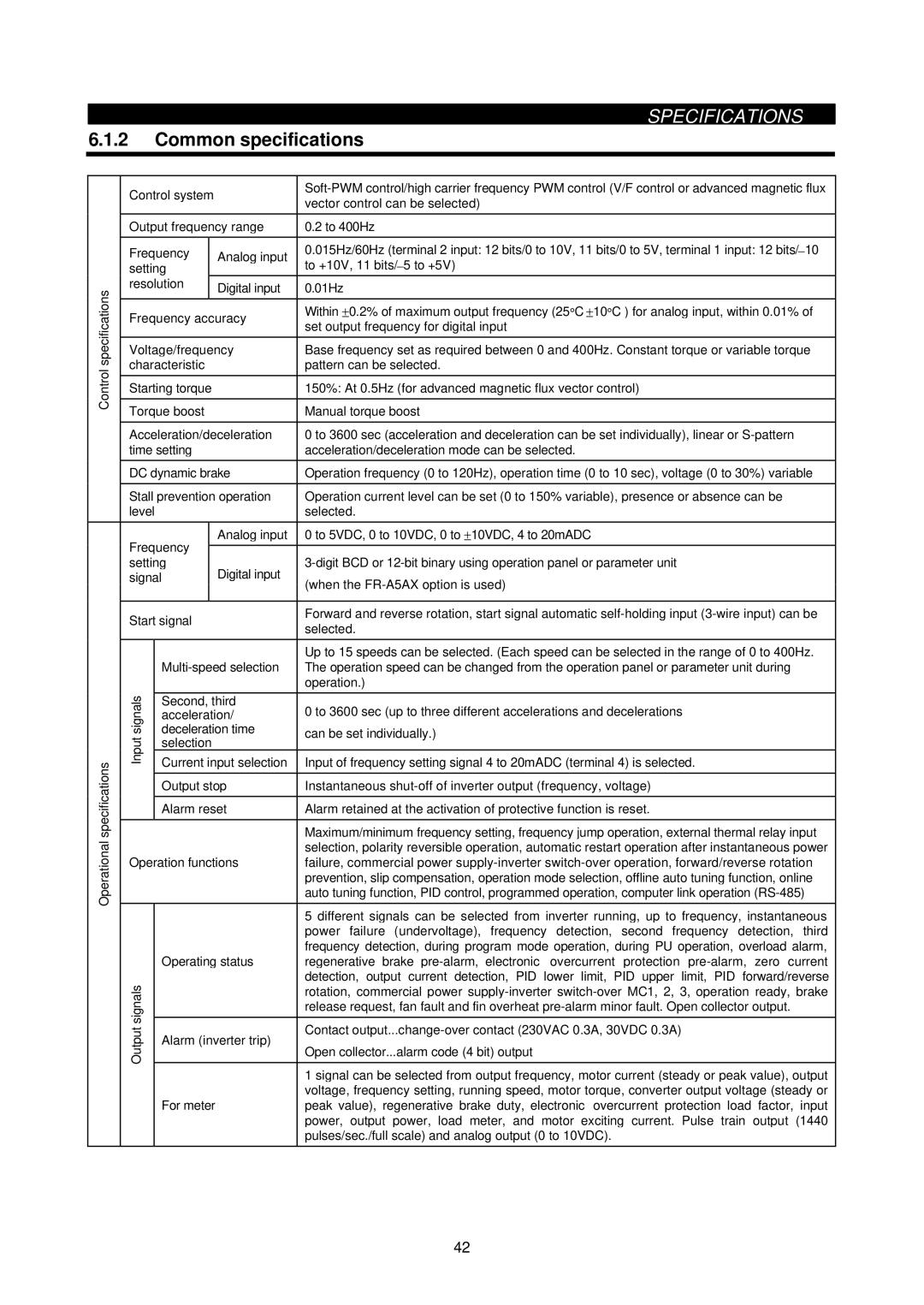
| Control system |
| |||||||
|
| vector control can be selected) |
|
| |||||
|
|
|
|
|
|
|
| ||
|
|
|
|
|
|
| |||
| Output frequency range | 0.2 to 400Hz |
|
| |||||
|
|
|
|
|
| ||||
| Frequency |
| Analog input | 0.015Hz/60Hz (terminal 2 input: 12 bits/0 to 10V, 11 bits/0 to 5V, terminal 1 input: 12 bits/−10 | |||||
| setting |
|
| to +10V, 11 bits/−5 to +5V) |
|
| |||
specifications | resolution |
| Digital input | 0.01Hz |
|
| |||
|
|
|
|
|
| ||||
|
|
|
|
|
|
|
| ||
Frequency accuracy | Within ±0.2% of maximum output frequency (25°C ±10°C ) for analog input, within 0.01% of | ||||||||
| |||||||||
| set output frequency for digital input |
|
| ||||||
|
|
|
|
|
|
|
| ||
|
|
|
| ||||||
| Voltage/frequency | Base frequency set as required between 0 and 400Hz. Constant torque or variable torque | |||||||
Control | characteristic |
| pattern can be selected. |
|
| ||||
|
|
|
|
|
|
|
| ||
Starting torque |
| 150%: At 0.5Hz (for advanced magnetic flux vector control) |
| ||||||
|
|
| |||||||
|
|
|
|
|
|
| |||
| Torque boost |
| Manual torque boost |
|
| ||||
|
|
|
| ||||||
| Acceleration/deceleration | 0 to 3600 sec (acceleration and deceleration can be set individually), linear or | |||||||
| time setting |
| acceleration/deceleration mode can be selected. |
| |||||
|
|
|
| ||||||
| DC dynamic brake | Operation frequency (0 to 120Hz), operation time (0 to 10 sec), voltage (0 to 30%) variable | |||||||
|
|
|
| ||||||
| Stall prevention operation | Operation current level can be set (0 to 150% variable), presence or absence can be | |||||||
| level |
|
|
| selected. |
|
| ||
|
|
|
|
|
|
|
| ||
| Frequency |
| Analog input | 0 to 5VDC, 0 to 10VDC, 0 to ±10VDC, 4 to 20mADC |
| ||||
|
|
|
|
|
| ||||
|
|
|
|
|
| ||||
| setting |
| Digital input |
| |||||
| signal |
|
| (when the |
|
| |||
|
|
|
|
|
|
|
| ||
|
|
|
|
|
|
| |||
| Start signal |
| Forward and reverse rotation, start signal automatic | ||||||
|
| selected. |
|
| |||||
|
|
|
|
|
|
|
| ||
|
|
|
|
|
|
| |||
|
|
|
|
|
| Up to 15 speeds can be selected. (Each speed can be selected in the range of 0 to 400Hz. | |||
|
|
| The operation speed can be changed from the operation panel or parameter unit during | ||||||
|
|
|
|
|
| operation.) |
|
| |
|
|
|
|
|
|
| |||
| signals |
| Second, third | 0 to 3600 sec (up to three different accelerations and decelerations | |||||
|
| deceleration time | |||||||
|
|
| acceleration/ | ||||||
| Input |
| selection |
| can be set individually.) |
|
| ||
|
|
|
|
|
| ||||
specifications |
| Current input selection | Input of frequency setting signal 4 to 20mADC (terminal 4) is selected. | ||||||
|
|
|
|
| |||||
|
| Output stop | Maximum/minimum frequency setting, frequency jump operation, external thermal relay input | ||||||
|
|
| Instantaneous |
| |||||
|
|
| Alarm reset | Alarm retained at the activation of protective function is reset. |
| ||||
Operational |
|
|
|
|
| selection, polarity reversible operation, automatic restart operation after instantaneous power | |||
|
|
|
|
|
| ||||
| Operation functions | failure, commercial power | |||||||
|
|
|
|
|
| prevention, slip compensation, operation mode selection, offline auto tuning function, online | |||
|
|
|
|
|
| auto tuning function, PID control, programmed operation, computer link operation | |||
|
|
|
|
|
|
| |||
|
|
|
|
|
| 5 different signals can be selected from inverter running, up to frequency, instantaneous | |||
|
|
|
|
|
| power failure (undervoltage), frequency detection, second frequency detection, third | |||
|
|
|
|
|
| frequency detection, during program mode operation, during PU operation, overload alarm, | |||
|
|
| Operating status | regenerative brake | overcurrent protection | ||||
| signals |
|
|
|
| detection, output current detection, PID | lower limit, PID upper | limit, PID forward/reverse | |
|
|
|
|
| rotation, commercial power | ||||
|
|
|
|
|
| ||||
|
|
|
|
|
| release request, fan fault and fin overheat | |||
|
|
|
|
|
|
|
| ||
| Output |
| Alarm (inverter trip) | Contact |
| ||||
|
| Open collector...alarm code (4 bit) output |
|
| |||||
|
|
|
|
| |||||
|
|
|
|
|
|
|
| ||
|
|
|
|
|
|
| |||
|
|
|
|
|
| 1 signal can be selected from output frequency, motor current (steady or peak value), output | |||
|
|
|
|
|
| voltage, frequency setting, running speed, motor torque, converter output voltage (steady or | |||
|
|
| For meter |
| peak value), regenerative brake duty, electronic overcurrent protection load factor, input | ||||
|
|
|
|
|
| power, output power, load meter, and motor exciting current. Pulse train output (1440 | |||
|
|
|
|
|
| pulses/sec./full scale) and analog output (0 to 10VDC). |
| ||
|
|
|
|
|
|
|
|
| |
42