Dual Channel Digital Motor Controller
AX500
AX500 Motor Controller User’s Manual
Date Version Changes
Revision History
Revision History
AX500 Motor Controller User’s Manual
Section
Section
Section
101
112
Operating the AX500 over a Wired or Wireless LAN
Avoid Shorts when Mounting Board against Chassis
Important Safety
Do not Connect to a RC Radio with a Battery Attached
To the Battery
Important Safety Warnings
AX500
Locating the Connectors
Quick Start
What you will need
AX500 Quick Start
Power Must be con
Nected to VCon
VMot for the controller
Connecting to the Batteries and Motors
Connecting to the Batteries and Motors
Signal Pin RC Mode RS232 Mode Analog Mode
Connecting to the 15-pin Connector
Connecting the R/C Radio
Powering On the Controller
Powering On the Controller
Parameter Default Values Letter
Default Controller Configuration
Connecting the controller to your PC using Roborun
Obtaining the Controller’s Software Revision Number
Obtaining the Controller’s Software Revision Number
Exploring further
Product Description
AX500 Motor Controller Overview
Technical features
Low Power Consumption
Technical features
High Efficiency Motor Power Outputs
Advanced Safety Features
Data Logging Capabilities
Power Connections
Connecting Power and Motors to the Controller
Power Connections
Connecting Power and Motors to the Controller
Controller Power
Powering the Controller from a single Battery
Controller Powering Schemes
Controller Powering Schemes
VCon VMot Controller Status
Powering the Controller Using a Main and Backup Battery
Connecting the Motors
Single Channel Operation
Single Channel Operation
Converting the AX500 to Single Channel
Power Fuses
Electrical Noise Reduction Techniques
Wire Length Limits
Power Regeneration Considerations
Undervoltage Protection
Overvoltage Protection
Using the Controller with a Power Supply
Using the Controller with a Power Supply
Connecting Power and Motors to the Controller
General Operation
Input Command Modes
Basic Operation
Basic Operation
Open Loop, Separate Speed Control
Selecting the Motor Control Modes
Open Loop, Mixed Speed Control
General Operation
Selecting the Motor Control Modes
Closed Loop Speed Control
Close Loop Position Control
Temperature Max Amps
User Selected Current Limit Settings
Temperature-Based Current Limitation
Motor Current = Battery Current / PWM ratio
Battery Current vs. Motor Current
Battery Current vs. Motor Current
Off
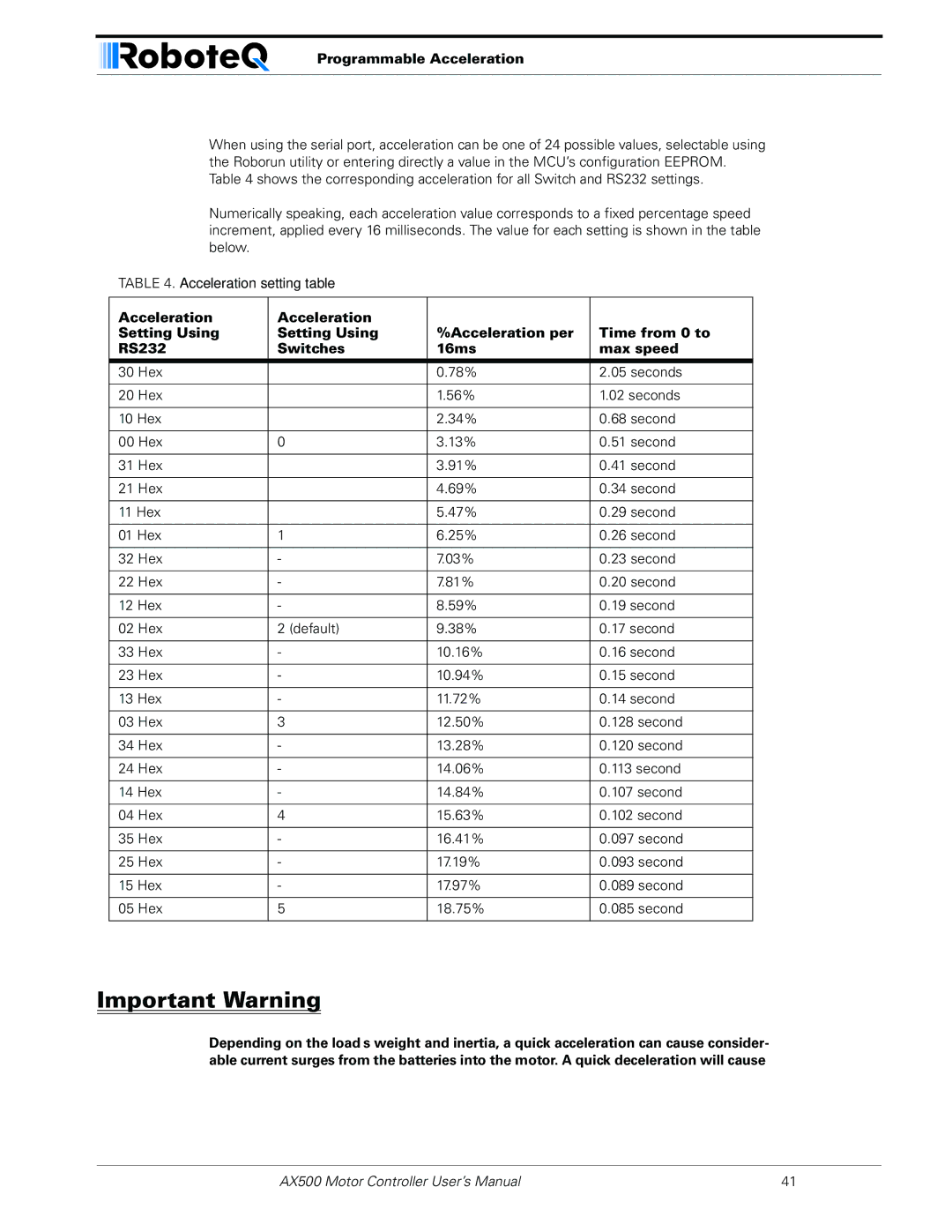
Programmable Acceleration
Programmable Acceleration
Command Control Curves
Exponentiation Parameter Value Selected Curve
Left / Right Tuning Adjustment
Left / Right Tuning Adjustment
Parameter Value Speed Adjustment
Activating Brake Release or Separate Motor Excitation
Emergency Stop using External Switch
Inverted Operation
Activating Brake Release or Separate Motor Excitation
Using the Inputs to Activate the Buffered Output
Special Use of Accessory Digital Inputs
AX500 Connections
Connecting Sensors and Actuators to Input/Outputs
AX500 Connections
AX500’s Inputs and Outputs
Connecting Sensors and Actuators to Input/Outputs
AX500’s Inputs and Outputs
Signal Type Use Activated
List and Pin Assignment
Pin1
Connecting devices to Output C
Connecting devices to Output C
Connecting Switches or Devices to Input F
Connecting Switches or Devices to Input E
Connecting Switches or Devices to EStop/Invert Input
Connecting Switches or Devices to EStop/Invert Input
Analog Inputs
Connecting Position Potentiometers to Analog Inputs
Ana Ana2 Operating Mode Pin
Connecting Tachometer to Analog Inputs
Connecting Tachometer to Analog Inputs
Operating Mode Ana 1 p11 Ana2 p10 Ana 3 p12 Ana 4 p8
Connecting External Thermistor to Analog Inputs
Connecting External Thermistor to Analog Inputs
Temp oC
Resistance kOhm
Using the Analog Inputs to Monitor External Voltages
Internal Voltage Monitoring Sensors
Connecting User Devices to Analog Inputs
Internal Heatsink Temperature Sensors
Temperature Conversion C Source Code
Internal Heatsink Temperature Sensors
Connecting Sensors and Actuators to Input/Outputs
Mode Description
Closed Loop Position Mode
Selecting the Position Mode
Mode Description
Sensor Mounting
Closed Loop Position Mode
Position Sensor Selection
Feedback Potentiometer wiring in RC or RS232 Mode
Feedback Potentiometer wiring
Feedback Potentiometer wiring in Analog Mode
Feedback Potentiometer wiring
Analog Feedback on Single Channel Controllers
Sensor and Motor Polarity
Sensor and Motor Polarity
Adding Safety Limit Switches
Encoder Error Detection and Protection
Adding Safety Limit Switches
Control Loop Description
Using Current Limiting as Protection
PID tuning in Position Mode
PID tuning in Position Mode
Closed Loop Position Mode
Selecting the Speed Mode
Closed Loop Speed Mode
Closed Loop Speed Mode
Tachometer wiring
Tachometer or Encoder Mounting
Speed Sensor and Motor Polarity
Adjust Offset and Max Speed
Adjust Offset and Max Speed
Control Loop Description
PID tuning in Speed Mode
PID tuning in Speed Mode
Closed Loop Speed Mode
Diagnostic LED
Normal Fault Condition LED Messages
Diagnostic LED
Normal Operation Flashing Pattern
Normal and Fault Condition LED Messages
Output Off / Fault Condition
C Operation
C radio control mode
Connector I/O Pin Assignment R/C Mode
Selecting the R/C Input Mode
Pin Input or Number Output Signal Description
Operation
Input Circuit Description
Input Circuit Description
Supplied Cable Description
RC connection cable
Powering the Radio from the controller
Connecting to a Separately Powered Radio
Connecting to a Separately Powered Radio
Wiring when receiver is powered by its own separate battery
Operating the Controller in R/C mode
Reception Watchdog
Reception Watchdog
Joystick Deadband Programming
Transmitter/Receiver Quality Considerations
Effect of deadband on joystick position vs. motor speed
Command Control Curves
Joystick Calibration
Left/Right Tuning Adjustment
Data Logging in R/C Mode
Data Logging in R/C Mode
DB9 Female
Analog Control and Operation
Analog Control and Operation
Connector I/O Pin Assignment Analog Mode
Pin Input or Number Signal Output Description
Connecting to a Voltage Source
Connecting to a Voltage Source
Connecting a Potentiometer
= U/R = 5V / 1000 Ohms = 0.005A = 5mA
Selecting the Potentiometer Value
Analog Deadband Adjustment
Analog Deadband Adjustment
Data Logging in Analog Mode
Power-On Safety
Under Voltage Safety
Modified Analog cable with RS232 output data logging for PC
Data Logging in Analog Mode
100
Use and benefits of RS232
Serial RS-232 Controls Operation
Use and benefits of RS232
Serial RS-232 Controls and Operation
Connector I/O Pin Assignment RS232 Mode
Extending the RS232 Cable
Cable configuration
Cable configuration
Establishing Manual Communication with a PC
Communication Settings
Bits/s, 7-bit data, 1 Start bit, 1 Stop bit, Even Parity
Data Logging String in R/C or Analog mode
Entering RS232 from R/C or Analog mode
Establishing Manual Communication with a PC
Roboteq v1.9b 06/01/07 s
RS232 Mode if default
Commands Acknowledge and Error Messages
Command Acknowledgement
Command Error
Command Type Description
Controller Commands and Queries
RS-232 Watchdog
Watchdog time-out
Set Accessory Output
Set Motor Command Value
Syntax
Query Power Applied to Motors
Query Amps from Battery to each Motor Channel
Query Analog Inputs
Query Heatsink Temperatures
?r or ?R
?m or ?M
Reset Controller
Query Battery Voltages
Controller Commands and Queries
Query Digital Inputs
Apply Parameter Changes
Accessing & Changing Configuration Parameter in Flash
Read parameter
Modify parameter
Location Description Active after
Flash Configuration Parameters List
Accessing & Changing Configuration Parameter in Flash
Motor Control Mode
Input Control Mode
Address Access Read/Write Effective After Reset
Value Mode See pages
Bit Definition See pages
Amps Limit
Acceleration
Input Switches Function
Exponentiation on Channel 1 and Channel
Address Channel Access Read/Write Effective Instantly
RC Joystick or Analog Deadband
Default PID Gains
Left/Right Adjust
Reading & Changing Operating Parameters at Runtime
Reading & Changing Operating Parameters at Runtime
Joystick Min, Max and Center Values
Bit Function
Operating Modes Registers
Location Function
Controller Status Register
Read/Change PID Values
PWM Frequency Register
Controller Identification Register
Bit Fault Condition Effect
Current Amps Limit Registers
Bit Model or Function
AX500 Motor Controller User’s Manual 123
124
Automatic Switching from RS232 to RC Mode
Automatic Switching from RS232 to RC Mode
Data Logging Cables
Analog and R/C Modes Data Logging String Format
Dec Hex
Decimal to Hexadecimal Conversion Table
Decimal to Hexadecimal Conversion Table
UDec Hex
AX500 Motor Controller User’s Manual 129
130
System Requirements
Using the Roborun Configuration Utility
Downloading and Installing the Utility
Using the Roborun Configuration Utility
Connecting the Controller to the PC
Roborun Frame, Tab and Menu Descriptions
Parameter Selection and Setting and Special Functions
Roborun Frame, Tab and Menu Descriptions
View Controller Connector Pinout
File and Program Management Commands
Getting On-Screen Help
Loading, Changing Controller Parameters
Motor Control Mode
Control Settings
Input Command Adjustment
Loading, Changing Controller Parameters
Power Settings
Joystick Timing
Analog or R/C Specific Settings
Deadband
Closed Loop Parameters
Running the Motors
Running the Motors
Motor Power setting
Run/Stop Button
Measurement
Input Status and Output Setting
Real-Time Strip Chart Recorder
Data Logging and Timer
Transmit and Receive Data
Logging Data to Disk
Connecting a Joystick
Using the Console
Command Entry
Using the Console
Send Reset String
Terminal Screen
Loading and Saving Profiles to Disk
Operating the AX500 over a Wired or Wireless LAN
Viewing and Logging Data in Analog and R/C Modes
Roboserver screenshot when idle
Operating the AX500 over a Wired or Wireless LAN
Updating the Encoder Software
Updating the Controller’s Software
Creating Customized Object Files
Objectmaker creates controller firmware with custom defaults
148
Mechanical Dimensions
Mechanical Specifications
Mechanical Dimensions
Thermal Considerations
Mechanical Specifications
Mounting Considerations
Attaching the Controller Directly to a Chassis
Attaching the Controller Directly to a Chassis
Precautions to observe
Wire Dimensions
Wire Dimensions
Weight
154