E6581738
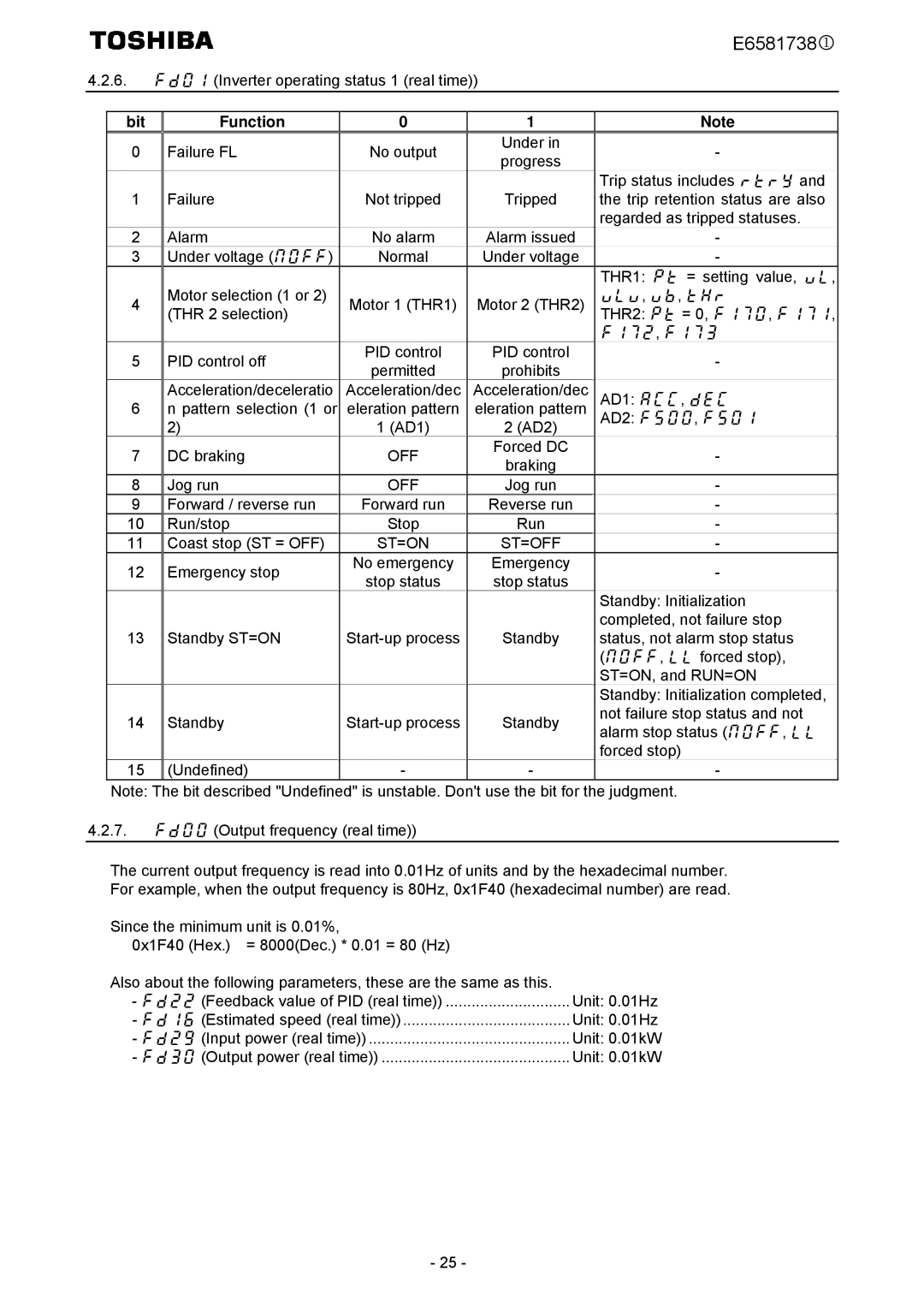
4.2.6.fd01 (Inverter operating status 1 (real time))
bit
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
Function | 0 | 1 | Note | |
Failure FL | No output | Under in | - | |
progress | ||||
|
| Trip status includes rtry and | ||
|
|
| ||
Failure | Not tripped | Tripped | the trip retention status are also | |
|
|
| regarded as tripped statuses. | |
Alarm | No alarm | Alarm issued | - | |
Under voltage (moff) | Normal | Under voltage | - | |
Motor selection (1 or 2) |
|
| THR1: pt = setting value, vl, | |
Motor 1 (THR1) | Motor 2 (THR2) | vlv, vb, thr | ||
(THR 2 selection) |
|
| THR2: pt = 0, f170, f171, | |
| PID control | PID control | f172, f173 | |
PID control off | - | |||
permitted | prohibits | |||
Acceleration/deceleratio |
| |||
Acceleration/dec | Acceleration/dec | AD1: acc, dec | ||
n pattern selection (1 or | eleration pattern | eleration pattern | ||
2) | 1 (AD1) | 2 (AD2) | AD2: f500, f501 | |
| ||||
DC braking | OFF | Forced DC | - | |
braking | ||||
|
|
| ||
Jog run | OFF | Jog run | - | |
Forward / reverse run | Forward run | Reverse run | - | |
Run/stop | Stop | Run | - | |
Coast stop (ST = OFF) | ST=ON | ST=OFF | - | |
Emergency stop | No emergency | Emergency | - | |
stop status | stop status | |||
| Standby: Initialization | |||
|
|
| ||
Standby ST=ON | Standby | completed, not failure stop | ||
status, not alarm stop status | ||||
|
|
| (moff, ll forced stop), | |
|
|
| ST=ON, and RUN=ON | |
|
|
| Standby: Initialization completed, | |
Standby | Standby | not failure stop status and not | ||
alarm stop status (moff, ll | ||||
|
|
| ||
|
|
| forced stop) | |
(Undefined) | - | - | - |
Note: The bit described "Undefined" is unstable. Don't use the bit for the judgment.
4.2.7.fd00 (Output frequency (real time))
The current output frequency is read into 0.01Hz of units and by the hexadecimal number. For example, when the output frequency is 80Hz, 0x1F40 (hexadecimal number) are read.
Since the minimum unit is 0.01%,
0x1F40 (Hex.) = 8000(Dec.) * 0.01 = 80 (Hz) |
|
Also about the following parameters, these are the same as this. |
|
- fd22 (Feedback value of PID (real time)) | Unit: 0.01Hz |
- fd16 (Estimated speed (real time)) | Unit: 0.01Hz |
- fd29 (Input power (real time)) | Unit: 0.01kW |
- fd30 (Output power (real time)) | Unit: 0.01kW |
- 25 -