Model FS-5070
00016050112
Important Notice
Safety Instructions
Iii
Distress Alert Message Procedure
For IC-302 option operation
Canceling Distress Alert
Distress Cancellation Proc. Select frequency Push Enter
Send cancel msg. by voice on 2182.0 kHz
Communicate, via radiotelephone, with the coast station
Table of Contents
Viii
Send calls
Menu Operation
Nbdp TRANSMITTING, Receiving
11.2
11.1
11-1
11-2
Xii
Features
Foreword
General
Program Number
Xiii
Xiv
System Configurations
Standard configuration is shown with solid line
FS-1570
FS-2570
Terminal Unit
Xvi
FS-5070
Controls
PWR/VOL knob Turns the power on/off Adjusts volume
Operational Overview
Description of controls
Turning the Power On/Off
Radiotelephone RT Screen
Radiotelephone RT screen
DSC Standby Screen
Indication
DSC standby screen
Setting Scan Frequencies
Control Unit Dimmer, Contrast
Loudspeaker
Equipment priority
Setting for Auto Acknowledgement
System Characteristics
Controls become inoperative
Automatic setting of working frequency
Intercom
SSB Radiotelephone
Choosing Class of Emission
Choosing band and band channel with the Enter knob
Choosing Channel, Frequency
Choosing channel
Rotate the Enter knob to set band or channel desired
Choosing frequency
Transmitting procedure
Transmitting
Entering frequency with the numeric keys
Reducing transmitter power
Condition of the transmitting unit
Rotate the Enter to adjust and then push the Enter knob
RF gain sensitivity adjustment
Checking the transmitting power
Receiving
Noise blanker
Receiving AM broadcasting stations
Squelch function
Squelch on/off
When Automatic Tuning Fails
High Tension Hazard
User Channels
DSC Message
What is DSC?
DSC Overview
Call Description
Contents of a DSC call
Audio Alarms
Alarm Frequency interval
Interpreting Call Displays
Receive calls
Distress receive call
Received message
Send calls
Individual receive call
View message
Individual send call
Compose msg
Distress operation overview
Distress Operations
Sending Distress Alert
Ship in Distress
Distress Operations
Received message
Push the Enter knob to open the Input Type menu
Twice and then go to step
Push the Enter knob to open the latitude input window
Push the Enter knob to open the time input window
Compose msg
Display changes as below example
Communicating by Nbdp Terminal Unit
Receiving a Distress Alert
Distress alert received on MF band
Action for ship receiving distress alert on MF band
Distress alert message received
Distress alert received on HF band
Distress acknowledge message in progress
Action for ships receiving distress alert on HF band
Agree
Sending the distress relay to coast station on HF band
Push the Enter knob to open the DSC FREQ. Menu
Wait for distress relay acknowledge
Sending Distress Relay on Behalf of a Ship in Distress
Sending distress relay to coast station
Push the Enter knob to open the Ship ID in Dist window
Ship ID in Dist
Telephone
Distress relay coast message in progress
Press the Cancel key to silence the audio alarm
Priority distress Transmit sure?
Distress relay ack message received
Sending distress relay to area ships
Area Circle
Ship ID in Dist Nature Telephone
Distress relay area message in progress
Cancelling Distress Call
Receiving Distress Relay from Coast Station
Distress Cancellation Proc. Select frequency Push Enter
Sending an individual call
Routine Message CALLING, Receiving
Individual Call
Operation overview
Push the Enter knob to open the Priority menu
NBDP-ARQ
How to Set Working Frequency, Channel
Safety or urgency priority
Routine priority
How to Set DSC Frequency
Compose msg
Press Call key for forced transmission
Able acknowledge message received
Able acknowledge call received
Unable acknowledge call received
Send Able acknowledge Send Unable acknowledge Manually
Receiving an individual call
No response! Try calling again?
Sending automatic acknowledge ACK BQ with comply type Able
Sending automatic acknowledge ACK BQ with comply type Unable
Unable acknowledge message in progress
Manually acknowledging individual call with Able
Manually acknowledging individual call with Unable
No Reason Reason Busy
Group Call
Sending a group call
Press the 2/DSC key Select Message
MHZ
Receiving a group call
Sending message by Nbdp Terminal Unit
Geographical Area Call
Receiving message by Nbdp Terminal Unit
Sending a geographical area call
Area
Receiving a geographical area call
Geographical Area Sender ID
Neutral Craft Call
Sending a neutral craft call
Receiving a neutral craft call
Medical Transport Call
Sending a medical transport call
2187.5
Receiving a medical transport call
Press the Cancel key to return to the radiotelephone screen
Receiving a Polling Request
Automatic reply
Manual reply
Finding position of other station
Position Call
Requesting other ship’s position
Sending own ship’s position to other station
Station ID
Acknowledge message received
Cancel call Press the Cancel key
Position call other ship requests your position
Automatic reply
If canceling to send the reply, press the Cancel key
Manual reply
Pstn Call
Sending a Pstn call, receiving acknowledge back ACK BQ
Push the Enter knob to open the TEL NO. menu
To scroll
Waiting for acknowledgement
Receiving a Pstn call, sending acknowledge back ACK BQ
Then, one of the following displays appears
Unable acknowledge message received
Shortly thereafter, one of the following messages appears
No response! charge information
Manual
To view the contents of a file, do the following
To return to the log selected, press the Cancel key
Deleting log files
This page is intentionally left blank
Adjusting Handset Volume
Setup
Menu Operation
Registering user channels
Noise Blanker
Squelch Frequency
User ch entry
Push the Enter knob to open the user channel options window
Preparing individual calls
Preparing TX Message
Deleting user channels
Deleting individual user channels
Push the Enter knob to open the Station ID entry window
Frequency
How to Enter File Name and Number
Push the Enter knob to open the file name entry window
Preparing group calls
Push the Enter knob to continue
Message 2 MHZ
Preparing Pstn calls
Preparing test call
Sending without modification
Sending prepared messages
Deleting send message
Editing before sending
Manual Entry of Position and Time
Printing List of Send Message Files
Deleting all messages
After last digit
Memory Clear
Date and Time Setting
Date/Time setup
Memory clear
Clearing received ordinary log
Clearing received distress log
Clearing transmitted log
Setting Alarms
Restoring to default setting
Clearing user channels
Sound Setting
Sound setup
Setting the Auto ACK Details
OFF Hook
Printing Messages
Sample printouts
Distress and safety frequencies
Scan freq setup
Routine frequencies
Key assign setup
Key Assignment
Special Messages
FAX Enable/Disable
Speaker Setting in Off Hook
Operation Timer Off
This page is intentionally left blank
Nbdp System Overview
Turning on the Nbdp System
Nbdp terminal unit, printer and keyboard
Terminal unit
Features of the IB-583
Description of Equipment
Communication status display
Keyboard
Keyboard
Inverse video
Function Keys, Menu Operation
Menu conventions
Underline
File menu
Menu overview
Selecting menus
Selecting menu items and options
Function key description
Cut
Function key F2 Edit menu
Undo
Copy
Function key F3 Operate menu
Cancel Sending
Timer Operation
Call Station
Window menu
Or month, choose item with ↑ or ↓ key and change setting
Function key F4 Window menu
Displays desired calendar month and year. To change year
Station Entry
Timer Operation Entry
Function key F5 Station menu
Scan Entry
Function key F6 System menu
Setup
Slave Delay
TX/RX MSG Save
Cursor is choosing Window Color Setup press the Enter key
Function key F10 Break Disconnects the line
Registering answerback code
Nbdp Preparations
Registering Answerback Code & ID Codes
Answerback code entry screen
If the code is correct, press the Enter key again
Registering ID codes
Message for confirmation of code entered
ID code entry screen
Station List
Registering stations
OK/Cancel prompt
Editing/Deleting stations
Scanning group list
Timer operation entry screen
Timer Programming
Registering timer programs
3 5 0
Editing/Deleting timer programs
User channel entry screen
Registering scan channel groups
Scan Channel Groups
Editing/Deleting user channels
Scan entry screen
Editing/Deleting scan channel groups
Press the Enter key twice Press the ESC key
Creating Files
Nbdp File Operations
Opening and Closing Files
How a file is opened
Saving a File
Formatting floppy disks
Cutting and pasting text
Editing Files
Saving a file
Close text screen
Highlight
Copying and pasting text
Cutting text
Pasting text
Searching text
Copy and paste flow diagram
Select all
Search screen
Goto top, Goto bottom
Replacing text
Goto line
Replace screen
Renaming Files
Switching between files
Opening Files
Opening a file
Real Time Printing
Saving a File Under a New Name
Deleting Files
Printing Files
10-1
Nbdp TRANSMITTING, Receiving
Manual Calling
Set frequency screen
10-2
Manual calling screen
Establishing connection
ARQ Mode Operation
10-3
Press the 1 key to choose Call Station
Sending a file stored on a floppy disk
10-4
Transmit message by one of the following methods
Send file screen
10-5
FEC Mode Operation
Choosing Receive Mode
Stopping transmission
Communication Example
10-6
Communications example
10-7
Table of abbreviations
Command and abbreviation
Timer Operation
Enabling timer operation
Timer operation list
Stopping timer operation
Scanning
10-9
Automatic telex overview
Communication Buffer
Preparing Macrofiles for Automatic Telex
10-10
Registering answerback code
Preparations
10-11
Registering scan groups
Commands processed by Danish coast station Lyngby
Commands
Command Parameter Content
Command Function
Actual procedure for store-and-forward telex
Store-and-forward method
10-13
10-14
Sample macrofile for store-and-forward method
Close text prompt
Sample Dirtlx macrofile
Dirtlx macrofile
10-15
Sample Dirltx macrofile
Procedure for Dirtlx
10-16
Actual procedure
Automatic Telex using Macrofile
Basic procedure
10-17
10-18
Call macro screen
Press the ↓ key to choose a macrofile Press the Enter key
Maintenance & Troubleshooting
Radiotelephone Test
11-1
Maintenance
11-2
Simple Troubleshooting
11-3
FS-5070 only
Error Messages
Error messages
11-4
Replacement of Fuses
11-5
Test Call
11-6
11-7
Do the either way depending on the message shown in step
Test acknowledge message received
Nbdp Terminal Unit Maintenance
Self test results
11-9
System menu Example IB-583
Tone test
11-10
Tone test 2 Fox
Tone test 3 Beta
Appendix
Menu Tree
AP-1
Nbdp terminal unit telex
AP-2
TX kHz RX kHz Remarks File Name
Frequency Tables
AP-3
14. = Ship-to-ship
Custom channels to be programmed by Furuno dealers
AP-4
MF band working carrier frequencies ref. US CFR 47 Part
AP-5
MF band SSB working carrier frequencies
AP-6
MHz ITU SSB carrier frequencies ITU RR Appendix
AP-7
AP-8
12/16 ITU SSB carrier frequencies ITU RR Appendix
AP-9
18/19, 22, 25/26 ITU SSB carrier frequencies ITU RR Appendix
AP-10
MF band telex frequency table
AP-11
AP-12
Frequency /4
AP-13
ITU Telex frequency /4
AP-14
ITU Telex Frequency /4
Telex Abbreviations
AP-16
AP-17
Digital Interface IEC
Sentences
Input sentences IEC
AP-18
GLL Geographic position latitude/longitude
ZDA Time and date
AP-19
GNS Gnss fix data
AP-20
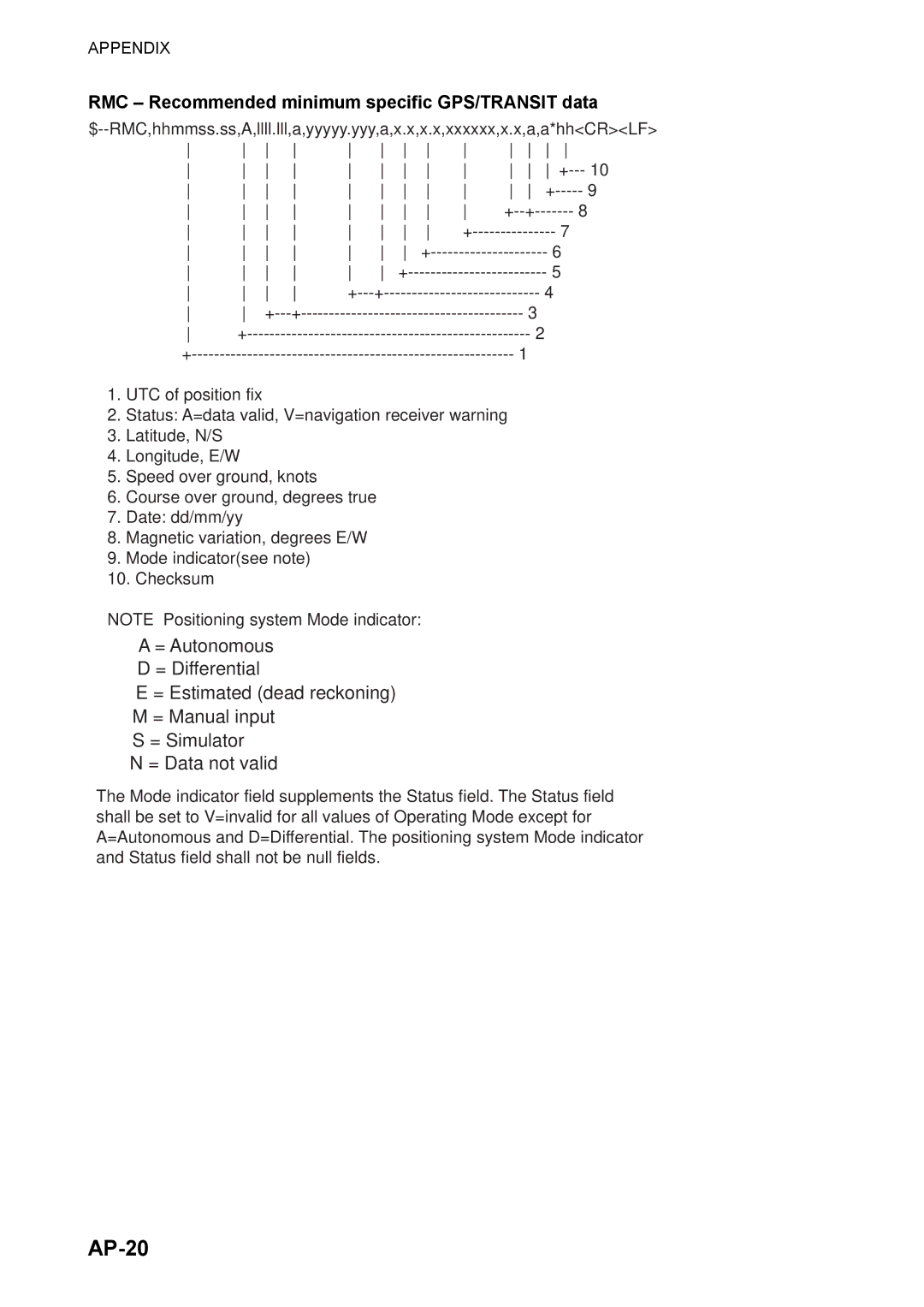
RMC Recommended minimum specific GPS/TRANSIT data
Schematic diagram
AP-21
Parts List
AP-22
Transceiver unit FS-1570T
AP-23
Transceiver unit FS-2570T
AP-24
Control unit FS-2571C
AP-25
Control unit FS-5070T
Parts Location
FS-1570T
AP-26
Transceiver unit FS-2570T
AP-27
Transceiver unit FS-5070T
AP-28
AP-29
Comb
Control unit FS-2571C
AP-30
Specifications of SSB Radiotelephone
FS-1570/2570/5070
DSC/WATCH Keeping Receiver
DSC/WATCH Receiver FS-5070
Nbdp Function Option
Terminal Unit IB-581 FS-1570/2570
Antenna Coupler FS-1570/2570
Antenna Coupler FS-5070
Coating Color
Index
Distress relay
IN-2
0560
Publication No. DOC-1028
0560