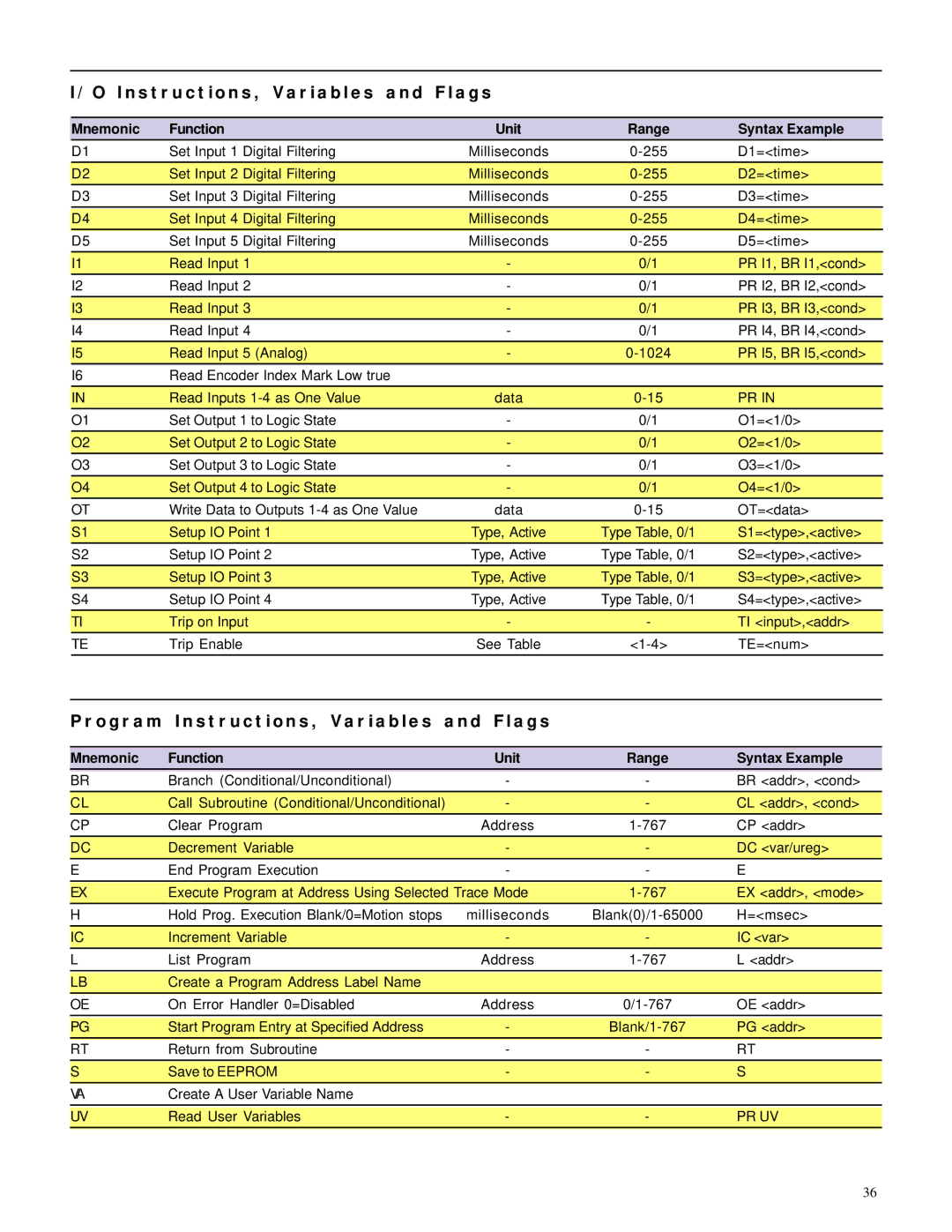
I / O I n s t r u c t i o n s , Va r i a b l e s a n d F l a g s
Mnemonic | Function | Unit | Range | Syntax Example |
D1 | Set Input 1 Digital Filtering | Milliseconds | D1=<time> | |
D2 | Set Input 2 Digital Filtering | Milliseconds | D2=<time> | |
D3 | Set Input 3 Digital Filtering | Milliseconds | D3=<time> | |
D4 | Set Input 4 Digital Filtering | Milliseconds | D4=<time> | |
D5 | Set Input 5 Digital Filtering | Milliseconds | D5=<time> | |
I1 | Read Input 1 | - | 0/1 | PR I1, BR I1,<cond> |
I2 | Read Input 2 | - | 0/1 | PR I2, BR I2,<cond> |
I3 | Read Input 3 | - | 0/1 | PR I3, BR I3,<cond> |
I4 | Read Input 4 | - | 0/1 | PR I4, BR I4,<cond> |
I5 | Read Input 5 (Analog) | - | PR I5, BR I5,<cond> | |
I6 | Read Encoder Index Mark Low true |
|
|
|
IN | Read Inputs | data | PR IN | |
O1 | Set Output 1 to Logic State | - | 0/1 | O1=<1/0> |
O2 | Set Output 2 to Logic State | - | 0/1 | O2=<1/0> |
O3 | Set Output 3 to Logic State | - | 0/1 | O3=<1/0> |
O4 | Set Output 4 to Logic State | - | 0/1 | O4=<1/0> |
OT | Write Data to Outputs | data | OT=<data> | |
S1 | Setup IO Point 1 | Type, Active | Type Table, 0/1 | S1=<type>,<active> |
S2 | Setup IO Point 2 | Type, Active | Type Table, 0/1 | S2=<type>,<active> |
S3 | Setup IO Point 3 | Type, Active | Type Table, 0/1 | S3=<type>,<active> |
S4 | Setup IO Point 4 | Type, Active | Type Table, 0/1 | S4=<type>,<active> |
TI | Trip on Input | - | - | TI <input>,<addr> |
TE | Trip Enable | See Table | TE=<num> |
P r o g r a m I n s t r u c t i o n s , Va r i a b l e s a n d F l a g s
Mnemonic | Function | Unit | Range | Syntax Example |
BR | Branch (Conditional/Unconditional) | - | - | BR <addr>, <cond> |
CL | Call Subroutine (Conditional/Unconditional) | - | - | CL <addr>, <cond> |
CP | Clear Program | Address | CP <addr> | |
DC | Decrement Variable | - | - | DC <var/ureg> |
E | End Program Execution | - | - | E |
EX | Execute Program at Address Using Selected Trace Mode | EX <addr>, <mode> | ||
H | Hold Prog. Execution Blank/0=Motion stops | milliseconds | H=<msec> | |
IC | Increment Variable | - | - | IC <var> |
L | List Program | Address | L <addr> | |
LB | Create a Program Address Label Name |
|
|
|
OE | On Error Handler 0=Disabled | Address | OE <addr> | |
|
|
|
|
|
PG | Start Program Entry at Specified Address | - | PG <addr> | |
RT | Return from Subroutine | - | - | RT |
S | Save to EEPROM | - | - | S |
VA | Create A User Variable Name |
|
|
|
|
|
|
|
|
UV | Read User Variables | - | - | PR UV |
36