MNEMONIC | FUNCTION | TYPE |
| Digital Input Filtering | I/O Variable |
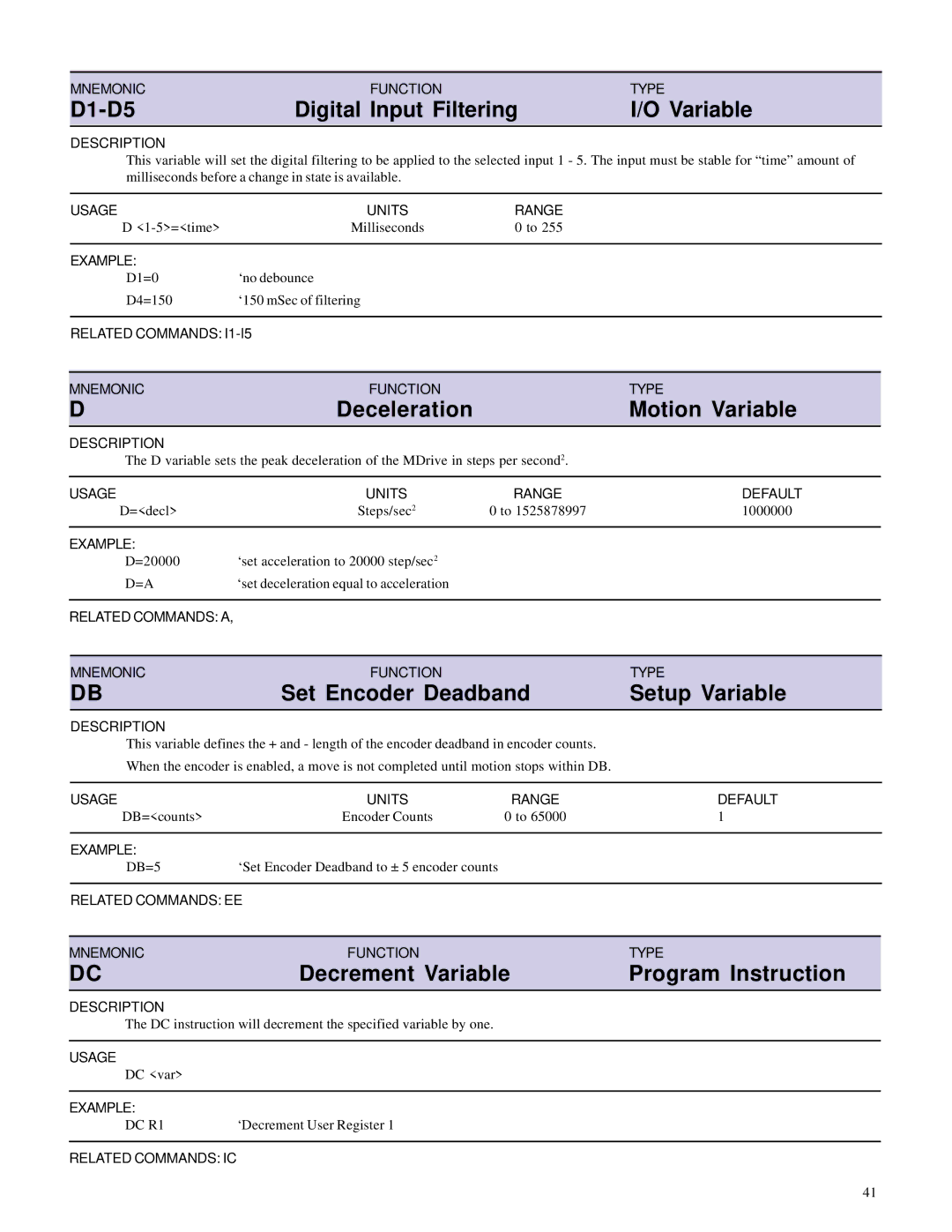
DESCRIPTION
This variable will set the digital filtering to be applied to the selected input 1 - 5. The input must be stable for “time” amount of milliseconds before a change in state is available.
USAGE | UNITS | RANGE |
|
D | Milliseconds | 0 to 255 |
|
|
|
|
|
EXAMPLE: |
|
|
|
D1=0 | ‘no debounce |
|
|
D4=150 | ‘150 mSec of filtering |
|
|
|
|
| |
RELATED COMMANDS: |
|
| |
|
|
|
|
MNEMONIC | FUNCTION |
| TYPE |
D | Deceleration |
| Motion Variable |
DESCRIPTION |
|
|
|
The D variable sets the peak deceleration of the MDrive in steps per second2. |
| ||
|
|
|
|
USAGE | UNITS | RANGE | DEFAULT |
D=<decl> | Steps/sec2 | 0 to 1525878997 | 1000000 |
|
|
|
|
EXAMPLE: |
|
|
|
D=20000 | ‘set acceleration to 20000 step/sec2 |
|
|
D=A | ‘set deceleration equal to acceleration |
|
|
|
|
|
|
RELATED COMMANDS: A, |
|
|
|
|
|
|
|
MNEMONIC | FUNCTION |
| TYPE |
DB | Set Encoder Deadband | Setup Variable | |
DESCRIPTION |
|
|
|
This variable defines the + and - length of the encoder deadband in encoder counts. |
| ||
When the encoder is enabled, a move is not completed until motion stops within DB. |
| ||
|
|
|
|
USAGE | UNITS | RANGE | DEFAULT |
DB=<counts> | Encoder Counts | 0 to 65000 | 1 |
|
|
|
|
EXAMPLE: |
|
|
|
DB=5 | ‘Set Encoder Deadband to ± 5 encoder counts |
| |
|
|
| |
RELATED COMMANDS: EE |
|
| |
|
|
|
|
MNEMONIC | FUNCTION |
| TYPE |
DC | Decrement Variable | Program Instruction | |
DESCRIPTION |
|
|
|
The DC instruction will decrement the specified variable by one. |
| ||
|
|
|
|
USAGE |
|
|
|
DC <var> |
|
|
|
|
|
|
|
EXAMPLE: |
|
|
|
DC R1 | ‘Decrement User Register 1 |
|
|
RELATED COMMANDS: IC
41